Hallo Leute,
danke für eure Antworten! Ich geh sie mal chronoligisch durch:
Jo:
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote">Versuch mal mit der Agressivität noch deutlich runter zu gehen und dafür mit Hysteresiswert hoch, mehr Bilder mitteln. Und längere Regelintervalle machen.<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
-> die Ergebnisse dieser Versuche ähneln den schlechteren Ergebnissen, die ich oben gepostet habe. Ich habe schon mit 40%agr und 2,5s Belichtungszeit gearbeitet und das hat nichts gebracht.
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote">Der Hysteresis-Wert ist ein dämpfendes Glied, damit wird ein vergangener Trend der Kalkulation mit in die Fehlerrechnung genommen. Damit werden zufällige Ausnahme-Spitzen abgemildert. Höher damit!<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
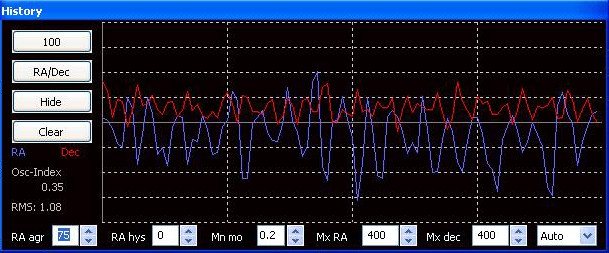
-> je höher ich diesen Wert stelle, desto niederfrequenter wird der Fehlerausschlag (und die Amplitude dazu größer)
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote">Min Motion in Pixels spielt eine Rolle bei Luftunruhe und gibt an zwischen wievielen Pixel ein Stern wackeln daf bevor überhaupt korrigiert wird. Sollte ja nicht gerade 0 sein. Je länger die Brennweite umso größer der Wert. Setz ihn erstmal höher an und geh dann runter. Vielleicht bei 0,5 anfangen und dann testweise immer weiter halbieren?<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
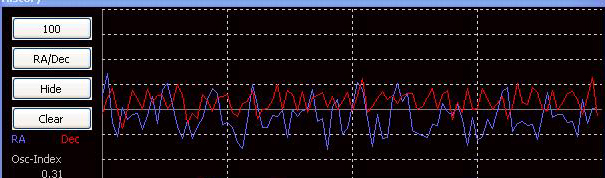
-> hehe das hört sich so doof von mir an, wenn ich jetzt sage, dass das auch nix gebracht hat, außer dass es schlechter wurde [B)] . Die Screenshots oben habe ich hier fürs Forum gemacht um die Kurvenform sehen zu können. Ich habe jetzt letzte Woche jeden Abend auf dem Balkon gesessen und nichts anderes gemacht als an den Reglerparametern zu spielen. Ich bin fast verrückt geworden.
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote">Und wichtig Timelapse. Das ist die besagte Totzeit zwischen Regelvorgang und erneuter Bildaufnahme (Messung) des Istwerts. Nicht zu kurz, sonst kommts zu Fehlmessungen und eher überschiessenden Reaktionen. Getriebe ist elastisch und Montierung mit Rohr haben eine träge Masse die Zeit zum reagieren benötigen.<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
-> die Timelapse habe ich schon vor nem Jahr erfolgreich aus meinem Repertoire rausgeschmissen, weil sie mir krasse Ausschläge verpasst hat. Wenn ich die wieder einschalte, kann ich das Graph Fenster zumachen, weil ich dann in dem PHD Hauptfenster sehen kann, wie der Stern tanzt.
Schmierung/Fettung Lagerspiel: Da behaupte ich einfach mal dass ich das im Griff habe, mechanisch ist bei meiner Montierung alles bestens!
Jetzt zu Silvia:
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote">Setz die RA agr auf 55 und die RA hys auf 25, die Belichtungszeit auf 1,5 s und guck, was der Graph macht<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
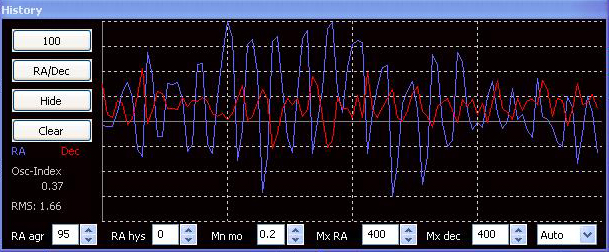
-> das bewirkt, dass die Kurve weicher wird mit größerer Amplitude und niedrigerer Frequenz.
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote">Mit den jetzigen Einstellungen guidest Du dem Seeing hinterher. Das kann die Montierung nicht und schaukelt sich dabei auf.<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
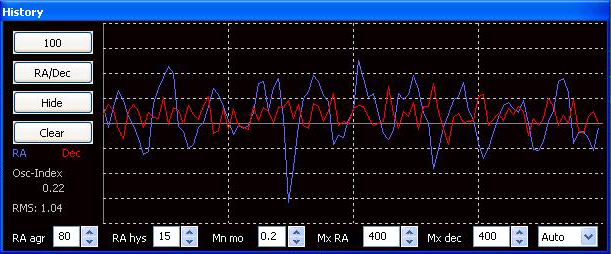
-> in DEC tut sie das ganz toll! Ich verstehe nicht, warum sich die Kurven so unterschiedlich verhalten. Das macht mich verrückt!
Mir kommt das ganze als Ungleichzeitigkeit des Gleichen vor. Vor einiger Zeit hatte ich massive Probleme, dass DEC viel größere Abweichung hatte, als RA, bis ich mich zum ersten mal intensiver mit PHD beschäftigte und dann den "DEC slope weight" Knopf gefunden habe. Beide Getriebe sind bei mir gleich schnell. Da war es klar das ein voreingestellter DEC slope-Wert von 5.0 DEC zum ausrasten brachte. Das Verändern dieser einen Zahl hat es dann auf einmal gebracht. Tolle Bilder waren möglich. Richtig gute Nachführung. Tolle Details in M1 bei über 1Std Belichtungszeit (addierte 5min Einzelbilder).
Und jetzt verhält es sich genau anders rum. Die RA zickt rum als gäbe es kein morgen.
Und ich hätte es auch lieber, wenn das Guiding mit mehreren Sekunden Belichtungszeit gelegentlich in die sauber laufende Nachführung eingreifen würde. Die besten Ergebnisse erziele ich jedoch mit hoher Aggressivität, ohne jede dämpfende Funktionen und ultrakurzer Belichtungszeit. Als ob RA ständig irgendeinen Mist anstellen würde, den man schnell detektieren muss um anschließend möglichst schnell und rigoros eingreifen zu können.
Über lange Zeit läuft meine Montierung richtig gut. Ich hatte die Montierung bei der letzten ISAN in Bonn auf der Wiese aufgestellt und Jupiter blieb über Stunden im Blickfeld, ohne das was passiert wäre.
Im kleineren Maßstab, also 3-4-fache Seeing-Amplitude und 3-4-fache Seeingfrequenz (verglichen mit der ausgeschalteten DEC Achse als reiner Seeingindikator) macht die RA was sie will. Soll das wirklich ein reiner Fehler in PHD sein?
Ich würde mich über weitere Kommentare sehr freuen!
Viele Grüße
Michael