Hallo zusammen,
hier im Forum gibt es ja viele sehr professionelle Fotografen mit teils erstaunlichen Ergebnissen (Beispiellinks: http://www.astrotreff.de/topic.asp?TOPIC_ID=163461 http://www.astrotreff.de/topic.asp?TOPIC_ID=149654 http://www.astrotreff.de/topic.asp?TOPIC_ID=163201 ).
Aus den verwendeten Bilddaten kann man aber auch erkennen, dass dafür ein hochwertiges Equiptment nötig ist. CCD, Filter, das ganze Programm.
Was mich als DSLR-Hobby Fotograf aber am meisten interessiert, was für viele schon fast normal zu sein scheint: wie kriegt ihr das so sauber geguidet?
Ich beschreibe mein Equiptment und die Resultate: Ich besitze einen 200/1000 Skywatcher Newton mit einem 70/700 LIDL-Leitrohr oben drauf. Am Newton hängt eine Cnon EOS 1000Da und am Leitrohr eine AlCCD5. Das ganze sitzt auf einer Selbstbaumontierung (Link: http://www.astrotreff.de/topic.asp?TOPIC_ID=144528 )mit einer Boxdörfer MTS-3. Geguidet wird mit der Software PHD, die DSLR wird mit BULB-Tool von Astrojan Tools ausgelöst.
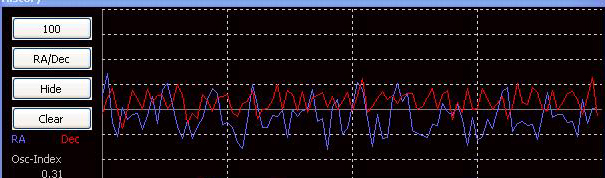
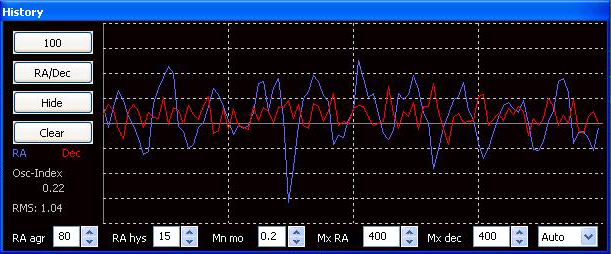
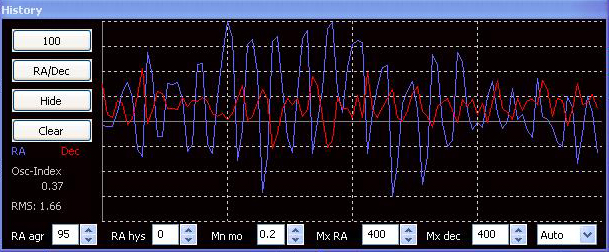
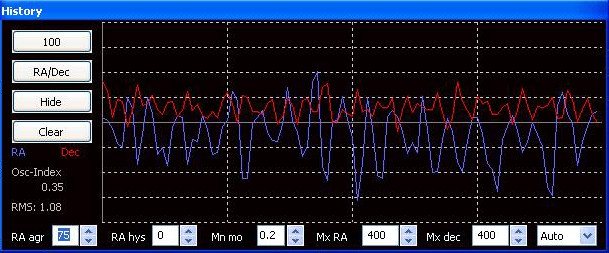
Jetzt scheint es einer Lotterie gleich, wann ich mal gute Fotos mache. Mal sind die Graphen von PHD schön sauber und scheinen nur durch das Seeing gestört zu werden. Ich verwende dabei an der AlCCD5 meist Belichtungszeiten von 0,5s , weil das bislang die besten Ergebnisse brachte. In anderen Nächten (leider häufiger) tanzen die Graphen auf und ab. Meißtens nur in RA. DEC kriege ich durch die Einstellung "North/South" in den Griff, sodass die Achse nur in eine Richtung fahren darf. Dann gibts natürlich auf der Aufnahme nur Würmchen und ich habe meist keine Lust mehr mich danach an den PC zu setzen um mich dann im größeren Maßstab davon zu überzeugen, dass das alles Müll war, was ich da produziert habe.
Bei den Profis unter euch scheint dieses Problem lange überwunden und ihr könnt euch um nachfolgende "Probleme" kümmern, die stationärer Natur sind: Welches Filterrad, Kamera, Binning, (weitere Sachen, die ich nicht verstehe). Ihr macht einfach Fotos und das perfekte Guiding scheint Routine und selbstverständlich zu sein.
Nun zu meinen Zielen: Ich möchte definitiv NICHT einen erheblichen Teil meines Einkommens für Astrofotos ausgeben. Die Ausrüstung besitze ich so schon seit 10 Jahren und ich möchte einfach mit der DSLR pro Abend ein Objekt machen und damit glücklich sein. Wenn mir eine Aufnahme geglückt ist, rahme ich mir die auch ein und hänge sie mir irgendwo hin. Mehr möchte ich auch nicht. Was ich möchte: mehr astronomisch brauchbare Nächte (von denen wir sowieso viel zu wenig haben) effektiv Nutzen und nicht mit Guiding Gefummel zu verbringen.
Ich habe das Guiding nicht sicher im Griff und ich weiß nicht woran es liegt, kann aber meine Suche eingrenzen: Die "grobe" Mechanik kann es nicht sein, die Monti ist der Hammer an Stabilität, sie ist ausbalanciert, die Getriebe gut geschmiert, alles läuft sauber. Die Befestigung zwischen Leitrohr und Aufnahmeteleskop ist auch stabil und sehr steif. Ich habe an zwei Nächten in der gleichen Position schonmal das gleiche Objekt aufgenommen. In der einen Nacht lief alles super, in der darauffolgenden nicht. Mechanische Gründe für dieses Verhalten schließe ich daher aus, da keine Veränderung an der Belastung bestimmter Teile auftrat.
Die "feine" Mechanik könnte da schon eher das Problem sein: die Motoren. Ich verwende die Synta Schrittmotoren aus den ersten EQ6-Montierungen. Diese Motoren haben ein eigenes Getriebe eingebaut und werden in der Szene häufig gegen hochwertigere Sanyo Denki Motoren/Getriebe Kombinationen getauscht, damit man schnelleres Goto mit der EQ-6 fahren kann. Ob diese Motoren samt Getriebe auch besser "laufen" als die Originale ist mir nicht bekannt, könnte aber ein Fehler sein. Kann mir jemand hierzu genauere Informationen geben?
Als letzte Fehlermöglichkeit fällt mir noch die Steuerung ein. Die Übersetzung meiner Getriebe verlangt von dem RA Motor ca. 12 Schritte/Sekunde. Mikroschitt hat die MTS3 nicht.
Wenn ihr keinen Hinweis auf mögliche Fehler habt, würde ich euch zumindest bitten, mir zu verraten, welcehs Equiptment bei euch für die Korrekte Nachführung zuständig ist.
Ich bedanke mich im Voraus für eure Hilfe!
Viele Grüße
Michael