Hallo zusammen,
da es mein erster Beitrag hier im Forum ist, möchte ich mich zuerst kurz vorstellen. Ich bin der Martin, ne [;)], und was die Astronomie angeht, noch ein ziemlicher greenhorn, aber es kann ja noch werden. Zu meiner Ausrüstung zähle ich ein 10 Zoll Dobson und ein wenig Zubehör.
Nun aber zum Thema.
Ich bin aktuell dabei mir für mein Teleskop eine Rockerbox mit auf RaspberryPi basierender Steuerung und vor allem Nachführung zu bauen. Meine Anforderungen sind wie folgt:
2 Schrittmotoren für die horizontale und vertikale Bewegung
1 Getriebemotor für den Okularauszug
Anzeige und Bedienen über ein kleines Touch-Display
Bewegungssteuerung über ein Nunchuk-Kontroller
Das Projekt ist mittlerweile so weit fortgeschritten, dass ich erste Ergebnisse Präsentieren kann:
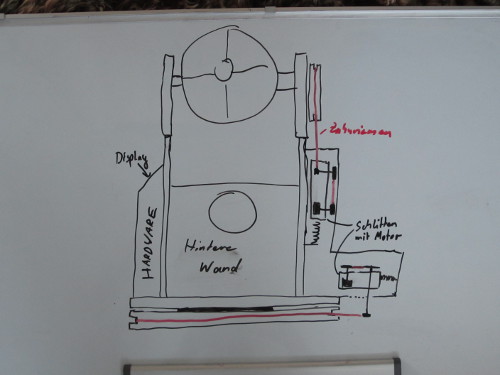
So in etwa war der Plan...

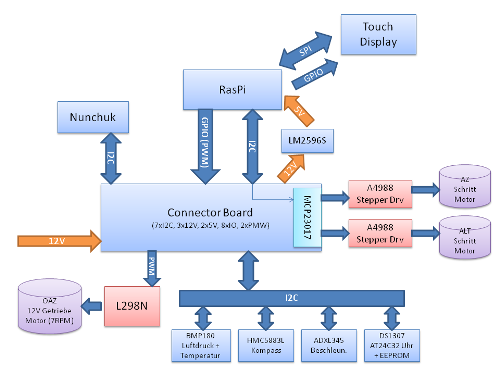
... und so der Prototyp-Aufbau.
Für die Software wollte ich neben der eigentlichen Steuerung auch einen Katalog mit Sternen und DS-Objekten haben, mit dem ich zum einen Abfragen kann, was ich da aktuell im Okular sehe und zum anderen das Teleskop per GoTo auf ein Objekt ausrichte.
Beim Aufbau soll mir eine Wasserwaage helfen das Teleskop gerade hinzustellen und anschließend will ich über die Ausrichtung auf einen Stern der Steuerung die benötigten Initialwerte übergeben.
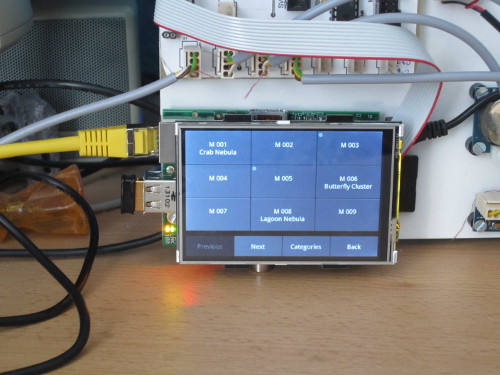
Im Moment sieht das Programm so aus:
Der Startbildschirm
Steuerungsbildschirm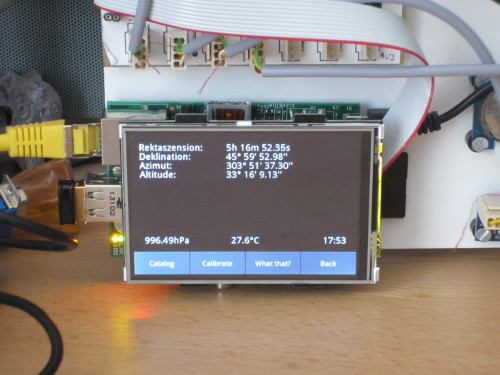
Wasserwaage
Katalog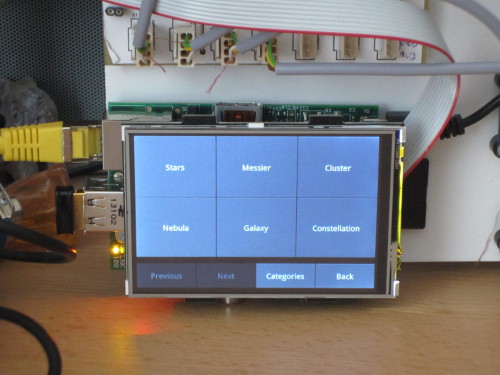

Aktuell bin bei beim Bau der Rockerbox und des Antriebs. Dabei sollen die Schrittmotoren über Zahnriemen um die Basis und ein Höhenrad das ganze bewegen. Die "Auflösung" pro Schritt wird dabei wohl um 11" in der horizontalen und 20" in der vertikalen Bewegung betragen. Da ich nur visuell beobachte, sollte es (hoffentlich) fein genug sein. Sobald ich da auch etwas vorzeigen kann, werde ich es hier reinstellen.
Wenn jemand zu dem aktuellen Stand mehr erfahren möchte, auf meiner kleinen Webseite befindet sich eine ausführlichere Beschreibung: http://www.mkoto.de/j/index.ph…zeitprojekte/6-dobcontrol
Vielleicht kann jemand ein paar der Ideen für sein Projekt gebrauchen. Fragen beantworte ich gerne ![]()
Grüße und ein wolkenfreies Wochenende,
Martin