
Hallo,
hier ein grober Entwurf für die Hardware zu diesem Pflichtenheft:
http://www.astrotreff.de/topic.asp?TOPIC_ID=102555
Code
Einzelne Steuerungskomponenten wie CPU, Interfaces, Motortreiber, etc. werden auf stapelbare Platinen verteilt.
(ähnlich wie bei PC104, siehe: http://de.wikipedia.org/wiki/PC/104)
Platinen sollen die Abmessungen von 80mm x 100mm haben, damit ein Platinendesign mittels Eagle Freeware-Version möglich ist.
Verbunden werden können die Platinen mit z.B. solchen stapelbaren Sandwich-Buchsenleisten:
http://www.conrad.de/ce/de/product/741634/PRAeZ-BUCHSENLEISTE-1-X-36-VERG-RM-254
oder
www.reichelt.de : “PC104 40L-12“
oder vielleicht auch, wobei Eignung noch zu prüfen wäre:
www.reichelt.de: „FL-C 64G13”
Handsteuerbox über RS232:
Wir könnten als erstes die unter GPL stehende Steuerbox von Hanno Rein verwenden:
http://old.hanno-rein.de/misc/handbox.html
Als CPU-Modul in der Entwicklungsphase bietet sich so was an:
ARM-Board: FriendlyARM
http://cgi.ebay.de/ws/eBayISAPI.dll?ViewItem&item=110540883506
oder von
www.olimex.com :
http://www.olimex.com/dev/sam7-h256.html
http://www.olimex.com/dev/sam7-p256.html
Antrieb:
je ein TMC428 mit TMC249 Trinamic über SPI angebunden
Fokus und Bildfeldderotator:
je ein TMC222 über I2C
USB:
USB<-> RS232 Umsetzer von FTDI über Optokoppler und DC/DC-Wandler galvanisch getrennt
RS232 -> PC:
auch über Optokoppler und DC/DC-Wandler galvanisch getrennt
Ethernet:
ENC28J60 an den internen SPI-Bus angebunden (siehe: http://www.mikrocontroller.net/articles/ENC28J60)
Dev-Board: http://www.tigal.com/1593
CAN:
Microchip's MCP2115 CAN Controller und MCP2551 CAN Transceiver wie hier:
Dev-Board: http://www.tigal.com/1112
Angebunden über SPI und über Optokoppler und DC/DC-Wandler galvanisch getrennt
Und ein Bildchen dazu: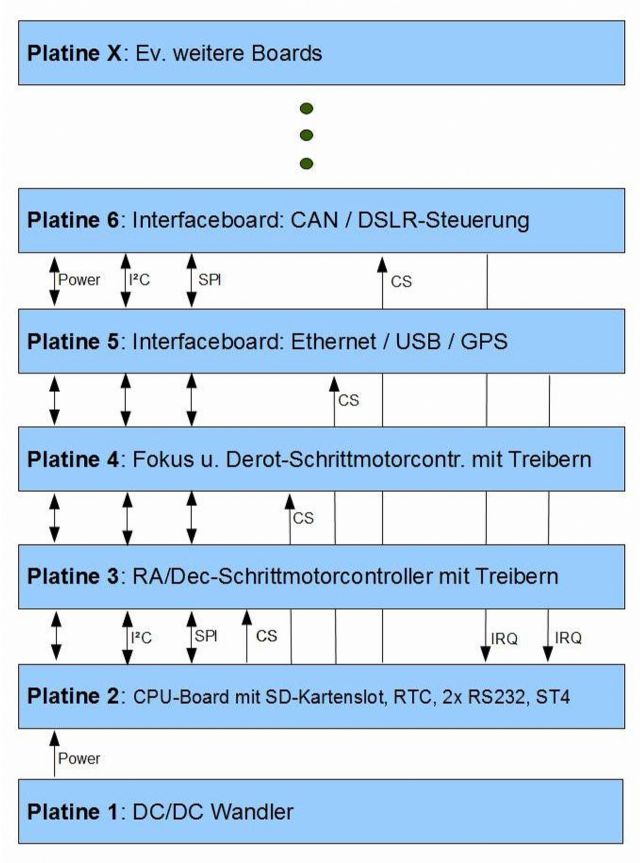
Grüße
Michael
