Hallo,
ich habe meine Montierung mit OnStep (https://onstep.groups.io/g/main/wiki) aufgerüstet.
Es ist diese Montierung

Da ich dazu aber nichts auf Deutsch im Internet gefunden habe.
Dachte ich mir, ich schreibe hier eine Anleitung, wie ich es gemacht habe.
OnStep ist ein Open-Source Computergestütztes Goto-System.
Steuern kann man es über eine App (Android), den integrierten Webserver oder einer Handbox, die man auch bauen kann.
Oder direkt über den PC.
Es lässt sich mit verschiedener Hardware betreiben.
Ich nutze hier eine 3D-Drucker-Platine FYSETC E4
und zwei Schrittmotoren für die beiden Achsen meiner Montierung.
Es sind Nema17 Motoren mit 1,5A Nennstrom und 1,8 Grad pro Schritt.
Die Verbindung von Motor zur Montierung mache ich mit einem Riemen und zwei Riemenscheiben im Übersetzungsverhältnis von 1 : 3
Als Spannungsversorgung nutze ich ein 12V 5A Netzteil (das hatte ich noch herumliegen)
Es lässt sich aber noch erweitern, mit z.B. einem zusätzlichen Motor für den Autofokus.
Oder einer Tauheizung ...
Als Erstes stand ich vor dem Problem, wie ich die Motoren befestige.
Ich habe mir hierzu zwei Halteplatten und Motorhalter konstruiert und mit dem 3D-Drucker ausgedruckt.
(https://cad.onshape.com/docume…/f8decb2b699c24c7957f4a06
https://cad.onshape.com/docume…/9b2f2d417a30ce27252d7b59)


Mithilfe des Langloches kann man den Riemen spannen.
Als Nächstes flashte ich die Software auf den ESP32 Chip der Platine.
Dazu mussten alle Steckbrücken aus der Platine entfernt werden und eine einzige Brücke, wie auf dem Bild gezeigt wird, gesteckt werden.
Ebenso habe ich ein Netzteil mit 12V an der Platine angeschlossen.
Die Motoren habe ich noch nicht angeschlossen.
(https://onstep.groups.io/g/main/wiki/32747)
Die Platine wurde dann am PC über USB angeschlossen. Zum Flashen nutzte ich den ESP OnStep Installer.
(https://graydigitalarts.com/OnStep-Web-Tools/)
Wenn man es manuell machen will, wäre hier eine ausführliche Anleitung
(https://onstep.groups.io/g/main/wiki/32794)
Hier wird ab dem Punkt Configuration auch beschrieben, wie es weitergeht.
Ich habe mich zuerst über W-Lan mit der Steuerung verbunden.
SSID: OnStepX
Passwort: password
Das Passwort gilt im übrigen überall, wo eines abgefragt wird.
Wenn man nun die IP-Adresse 192.168.0.1 in die Browseradressleiste eingibt, kommt man auf die Konfigseite von OnStep.
Hier muss als Erstes mit dem Button "Enable Advanced Configuration" die Konfigeinstellungen freigeschaltet werden.
Der Montierungstyp kann geändert werden, indem man unter "State" auf "Settings..." drückt.
Dann den Typ einstellt. Bei mir ist es "1".
Zum Übernehmen der Einstellungen muss auf "Upload" gedrückt werden.
Ich habe denn anschließend OnStep immer wieder neu gestartet (aus und eingesteckt) um zu prüfen, ob die Einstellungen übernommen wurden.
Nun kommen wir zu den Motoren:
Diese können über "Axis ..." Menüpunkte eingestellt werden.
Wichtig ist hier, dass der Motorstrom (mA Tracking Current) zwischen 30 % und 70% des Nennstroms des Motors liegen soll. Ich habe hier bei mir 800 mA eingestellt.
In der Beschreibung von OnStep heißt es. Mann soll es testen und beobachten. Es kann sein, dass der Motor oder der Motortreiber sehr heiß werden.
Ebenso kann es sein, dass der Strom zu klein ist und sich dadurch der Motor nicht dreht.
Hier muss man etwas experimentieren.
Die "Steps per degree" habe ich mit Hilfe dieser Excel Liste berechnet.

Bei Stepper-Steps kommt die Anzahl der Schritte rein, die der Motor für eine Umdrehung braucht. In meinen Fall 200 (360°/1,8°)
MICROSTEPS habe ich bei 32 belassen.
GR1 hier kommt das Übersetzungsverhältnis von den Riemenscheiben rein. In meinen Fall war das 3.
GR2 hier kommt das Verhältnis des Schneckenrades rein. Dies musste ich zählen. Hier kam ich auf 136 (Rektaszensionsachse / AXIS1) bzw. 88 (Deklinationsachse / AXIS2).
Den Rest habe ich gelassen, wie es war.
Nun habe ich die Steuerung wieder ausgesteckt (12V) und die Motoren angeschlossen. (Ich habe irgendwo gelesen, dass man die Motoren nicht unter Spannung an und abstecken soll.)
Dann konnte ich die ersten Tests starten.
Dazu nutzte ich die App. (https://play.google.com/store/search?q=onstep&c=apps&gl=DE)
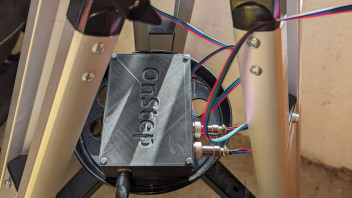
Für die Platine habe ich auch noch ein Kästchen entworfen und mit Steckern versehen.
Leider konnte ich bisher nicht viel testen. Da das Wetter nicht mitspielt.
Aber die ersten Versuche funktionierten ausgezeichnet.
Nachdem ich die Montierung eingerichtet und ich ein 3-Star-Alignment durchgeführt hatte.
Waren die Objekte die ich per GoTo angefahren habe alle im Sichtfeld des Teleskops.
Auch die Nachführung funktionierte gut. Das Objekt blieb immer im Zentrum.
Gruß
Johannes

