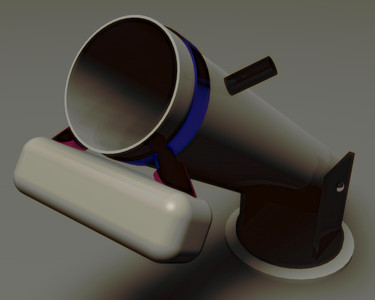
So ungefähr ist das gedacht:
Blauer Ring = Schelle um das Teleskop an einem von der Schwingungsachse weit entfernten Punkt
Rote Buchsen = Dämpfer, entweder mechanisch oder eben elektrisch.
Weißer Block = Halter der Dämpfer und gfs Elektronik. Muss noch per Gelenk auf ein Stativ.
"Elektrisch" hat den Vorteil, dass man über Gyrosensoren eine aktive Lageregelung bauen könnte. Die Mimik läuft in etwa so wie bei den Drohnen, die eine Kamera ausbalancieren. Das geht mittlerweile so gut, dass man trotz wackelnden Drohen, Wind und Resonanzen im System ein sehr stabiles Bild hat. Der weiße Block hätte dann ausreichend Masse, um sich davon "abzustoßen". Damit muss das Stativ nicht so stabil sein.
Die Anordnung steuert in 2 Achsen, weil Sin-Cos-Anordnung. Damit kann man rotatorisches Schwenken = Umlenken des Wackelns in die andere Achse sehr gut bekämpfen. Diese besteht z.T. aus Schwingen in Y unc Y, z.T. auch Torsion. Selbige lässt sich auch ausgleichen, weil die Rotation des Tubus (da Stäbe aus der Achse) eine Positionsänderung verursachen will. Auch ohne Regelung wirkt da schon die effektive Trägheit des Systems. Mit einer Regelung kann aus den Gyrosensoren die Bewegung extrahiert- und auf die Lageregelung angewandt werden. Dabei werden Sin und Cos über einen PID-Regler angesteuert, der sich mittelfrisitig auf 0 stellt, um wieder Regelreserve zu haben. Wenn man sich vor Augen führt, dass Hochhäuser und Brücken auf diese Weise mit aktiven Gegengewichten gegen Wind und sogar Erdbeben gesichert werden, könnte das eigentlich sehr gut funktionieren. Im Grunde muss die Masse dann nicht einmal auf ein Stativ sondern nimmt nur die Schwingung auf. 2 Achsen sollten für ein Dobson rein, weil das nicht längs der Achse wegschieben sollte. Bei einem klassischen Stativ braucht man gfs ein 3-Achsen-System. Für ein Dobson stelle ich mir einen Drucknopf an dem weissen Block vor, der sowohl die Regelung ausschaltet, eine Bremse auf die Zapfen setzt, damit das stabil beweglich wird und gleichzeitig eine elektronische Bremse am Lager des Dobson löst, damit man das System frei bewegen kann. Bei der Zielposionen einfach Knopf loslassen.
Eine passive, rein mechanische Variante müsste sich mit 2 Stoßdämpfern für Modellautos bauen lassen. Die Feder schiebt das Teil auf Mittenposition und die Dämpfung (meistens ein leichtviskoses Öl) sorgt für Energieverluste. Da sich zwischen den Bewegungen des Block und der Teleskopspitze eine zeitliche Phasenverschiebung ergibt, wird die Auslenkung immer sehr viel geringer ausfallen und besser vernichtet. Die Federwirkung des eingespannten Fernrohrs (Schwingskonstante) wäre auf die der Dämpfer abzustimmen. Die Masse des Blocks müsste vermutlich (nur) so hoch sein, dass sie unter Berücksichtigung des Montageabstands ungefähr dem Trägheitsmoment des Fernrohrs entspricht.