Das ist einfach mein "personal taste" aber ich versuche immer so dicht wie möglich an den (Farb-)Vorlagen im Netz zu bleiben.
Mein Workflow - mit Abwandlungen, je nach Objekt:
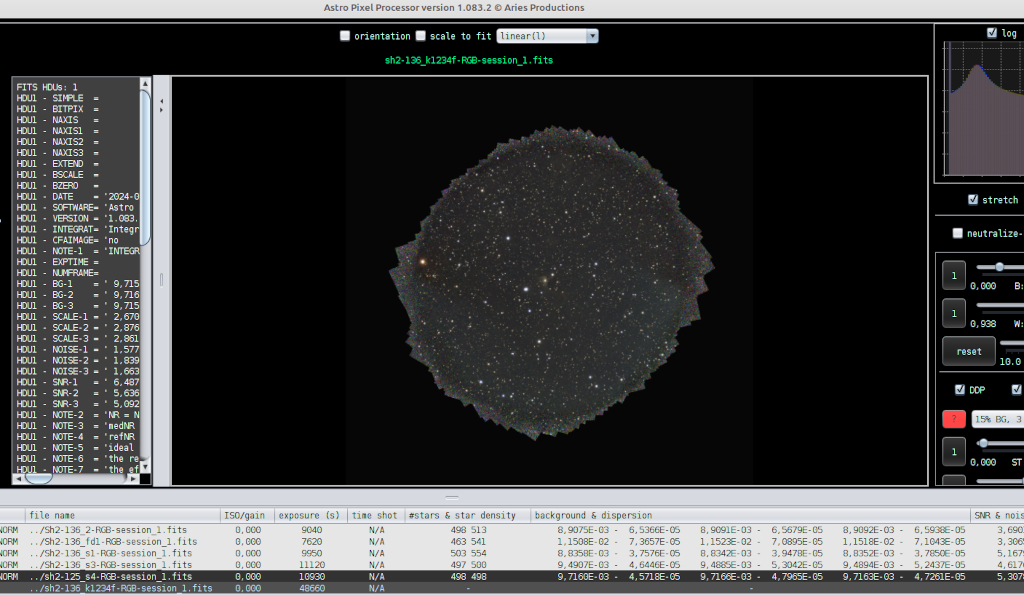
APP:
benutze ich zum Stacken.
Beim Integrieren stelle ich nicht "automatic" ein sondern "average" mit "weights" auf "quality".
Dann bei "local normalization rejection" auf "adaptive rejection" mit "kappa high = 2,8" (das rechnet alle Satellitenspuren raus).
Zusätzlich: "2nd degree LNC" mit 3 iterations
Pixinsight:
BlurXTerminator (am linearen Bild)
Autostretch und Histogram-Anpassung oder GHS
Automatic Background Extraction
Photoshop:
Farbbalance, HLVG (Hastalavistagreen)
Bild entsternen mit StarXTerminator (geht auch mit Starnet++)
entsternte Version in CameraRaw (Helligkeit, Kontrast, Schwarzwert, usw.) bearbeiten
entsternte Version mit Luminar4 - Plugin bearbeiten (Detailschärfe, lokaler Kontrast)
Version mit Sternen auf ca. 15% Helligkeit reduzieren
mehrfach, meist 3x durchgeführt: helligkeitsreduzierte Stern-Version als Layer im Modus "negativ Multiplizieren" mit Tonwertkorrektur auf die sternlose Version legen und "auf Hintergrundebene reduzieren"
Farbbalance, HLVG
Zwischendurch mit NoisXTerminator immer mal wieder leicht(!) entrauschen
evt. Gradienten entfernen mit GradientXTerminator (GraXpert geht natürlich auch)
Dynamik und Sättigung ganz leicht erhöhen
Unscharf maskieren
Gruß, Jochen