Hallihallo,
wie von Martin in Rüdigers Thread:
angekündigt, hier eine Kurzvorstellung eines ähnlich arbeitenden Systems, welches mit einem Mini-PC, genauer einer Raspberry Pi Minicomputerplatine, wirklich einfach realisiert werden kann.
Der unter uns "Interferometrierern" sehr bekannte US-Amateurastronom Dale Eason (dem ich an dieser Stelle nochmal recht herzlich danken möchte!), der ja für die Entwicklung der Software "Openfringe" bzw. "DFT-Fringe" bekannt ist, die ich fast jeden Tag nutze, hat wieder mal ein super Amateurprodukt entwickelt, das wir an der Volkssternwarte München nun nachgebaut haben.
Grund dafür war, dass es bisher kein mir bekanntes System gab, welches ZUVERLÄSSIG auf einem Dobson mit EQ-Plattform die digtitalen Teilkreise ersetzt. Ich hatte schon viele Experimente in diese Richtung gestartet, hatte dann aber irgendwann aufgegeben, weil beim zurücksetzen der EQ-Plattform meistens auch die Justage weg war.
Nun gibt es neben dem Starsense auch eine Bastlerlösung, die man einfach an ein beliebiges Teleskop "drankleben" kann, und die dem Handy, auf dem SKYSAFARI installiert ist, präzise mitteilt, wohin das Teleskop denn gerade zeigt. OHNE digitale Teilkreise, ohne großen Aufwand. Ich hatte im Jahr 2021 schon in amerikanischen Foren darüber gelesen und wollte es nachbauen, aber zu Beginn arbeitete das Ganze wohl nicht zuverlässig genug und ich nahm Abstand davon.
Nachdem Tassilo in unserer Gruppe das Thema aber vor Kurzem erneut erwähnte und in den US-Foren zu lesen war, dass der "SKYSOLVE" nach ein paar Verbesserungen nun wirklich zuverlässig funktioniert, haben Martin und ich nicht mehr lange gefackelt .
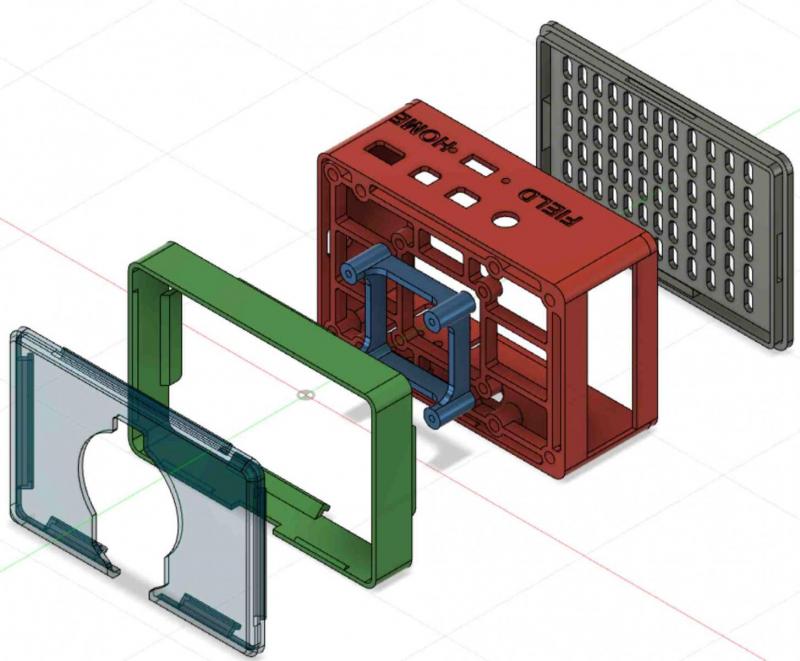
Das kleine Gerät ist ziemlich kompakt und leicht geworden, nachdem Gerd für Martin und mich dankenswerterweise zwei 3D-Drucke für das Gehäuse gedruckt hat. Merci nochmals, lieber Gerd!
Und so sieht das Gerät aus:
Das kleine schwarze Kästchen mit dem kleinen roten Schalter muss nur parallel zur optischen Achse des Teleskops, in diesem Fall mein
24"-Dobson, ausgerichtet werden. Dazu dient in Dale´s Software der "Align"-Mode, dessen Bezeichnung etwas verwirrend ist. Dieser Modus
dient ausschliesslich dazu, die Bildmitte mit der Gesichtsfeldmitte des Okulars in Deckung zu bringen.
Dann analysiert der Mini-Computer, der im Gehäuse integriert ist, das Bild, welches er durch das 25mm CS-Mount Objektiv erhält, per Plate-Solving und schickt die Koordinaten der Gesichtsfeldmitte an SKYSAFARI. Diese allseits bekannte Astrosoftware fürs Handy oder Tablet zeigt dann
per Fadenkreuz an, wohin die kleine Kamera - und damit auch das große Teleskop - blickt. Mann kann dann ein einfaches PUSH-TO zum
gewünschten Objekt vornehmen und das Objekt ist im Teleskopokular zu sehen!
Es dauert etwas, bis man sich an das Finden gewöhnt hat, da das Plate-Solving durch diesen Mini-Computer leider nicht mit Lichtgeschwindigkeit
durchgeführt wird. D.h. nur alle ca. 3 Sekunden gibt es eine Aktualisierung der Fadenkreuzposition in Skysafari. Aber nach nur einer halben Stunde "Übung" konnte ich vom Balkon aus blitzschnell sämtliche Objekte bei ca. 150-facher Vergrösserung im Gesichtsfeld eines Nagler 16mm Okulars erspähen. Einfach geil! ![]()
Die Stromversorgung (das einzige Kabel, das benötigt wird) erfolgt bei mir über eine kleine, flache 10.000mAh Powerbank, wie man sie vom Handy-Aufladen her kennt, über ein normales USB-C Kabel. Der Strombedarf liegt bei nur ca. 400mA, dh. man kommt ein paar Nächte mit so einer kleinen, handygrossen Powerbank klar.
Wer mehr Infos zu Dale´s System haben möchte, sieht sich am besten sein Video auf Youtube an:
Viele Grüße,
Alfredo ![]()