
hi!
cool - ich steuer die beiden motoren in separaten threads an - damit nicht 3 von 4 cores pennen ![]()
mir ist was anderes aufgefallen, der RAPS 128 hat 2.2 A spitzenstrom, oder? ich fürcht, dass das ein bisserl wenig ist ...
lg
wolfi

Offene Steuerung mit Encoder und Autoguider
- Birki
- Geschlossen
-
-
Hi Wolfi,
weit bevor die RAPS128 für die Teleskopsteuerungen bekannt wurden, habe ich diese Treiber mit der Onstep verwendet.
http://www.ebay.de/itm/FMD2725…26221?hash=item58c51b5a6dFür den Fall, daß dir der Phasenstrom zu gering ist. Die Dinger treiben meine G41 sehr ruhig an. Und da sind recht starke Motoren drinn.
Es hängt also davon ab, welche Motoren Du wirklich brauchst. Und welche Getriebe.
Der Vorteil der Onstep ist, daß man sie entsprechend konfigurieren kann. Im Code und auf der Hardware-Seite. -
Nachtrag:
Die Königsklasse mit absolutem Luxus, sowohl für Stepper als auch BLDC Motoren liefert Nanotec u.a. das hier:
http://de.nanotec.com/produkte…op-schrittmotorsteuerung/
Die kannst Du über UART3.3V ansteuern. Hab ich mal mit einem Beaglebone ausprobiert (NanoJ auf dem PC über Ser2Net auf dem Beaglebone), dann später Nachführung über die Timer-Klasse der C++ Boost Library.
Dann bleibt es einigermaßen portable. Das Ding kann einiges. Nur: Für den Preis baut man schon dicke zwei Onsteps. -
hi!
ja, ich weiss, meine montierungsmotoren sind alle nanotecs; die endstufe ist dem 1067-board von mir recht ähnlich recht ähnlich (vermutlich auch ähnlich teuer), kann aber 64 statt nur 16 mikroschritte, dafür hats aber nur RS232.
lg
wolfi
ps: ok - sie sind doppelt so teuer wie die 1067
-
Hallo Matthias,
dass 360*60*60/313600 = 4,13 eine sehr grobe Auflösung sind, habe ich dann auch mit der Zeit gemerkt ;). Damals waren es noch andere Motortreiber (A4988) mit 16 Mikroschritten, deshalb auch das spätere Upgrade auf RAPS128. Die Auflösung ist dann um den Faktor 8 gestiegen und das ist praktisch nicht mehr merkbar, zumindest im Visuellen.
Grüße,
koto
-
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote"><i>Original erstellt von: koto04</i>
<br />
dass 360*60*60/313600 = 4,13 eine sehr grobe Auflösung sind, habe ich dann auch mit der Zeit gemerkt ;).
<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
hi!habe wenig vorstellung, wie sehr sich das im dobson auswirkt, aber 3*10^5 steps klingt jetzt ned so viel - jetzt hast du demnach 2.4*10^6 steps?
lg
wolfi -
Hallo Wolfi,
ja, genau, 2.5*10^6 um genau zu sein ;). Wie gesagt, ich bewege mich bis auf ein paar Experimente mit einer Webcam und Planeten nur im Visuellen, dafür ist die Auflösung absolut ausreichend. Wenn man die umständliche Ansteuerung bei mir über i2c bedenkt und den "langsamen" raspi ist da viel luft nach oben. Das merke ich ja auch wenn ich mit der Einstellung 128 Mikroschritte das Teleskop mit voller Geschwindigkeit bewegebewege. Für das Tracking wäre in meiner Konfiguration was die Geschwindigkeit angeht vom Raspi sicher auch eine um den Faktor 20 höhere Auflösung möglich, ohne i2c dazwischen sicher noch um einiges mehr.
Grüße,
koto
-
Hallo zusammen,
hier ist die Tabelle wo man es sehen kann mit welche Auflösung ich meine Montierung treibe.

Ich fahre natürlich mit 128 Mikroschritte.
Gruß
Igor -
hi!
macht sinn, ich käme mit meinem derzeitigen setup und den phidgets auf 0.16"/mikroschritt.
lg wolfi -
Hallo Wolfi,
ich weis nicht wie du auf 0.16" kommst.
Laut deine Angaben komme ich auf ein anderen Wert raus.
Aber ich rechne mal was für dein Bespiel, was du bestimmt noch nicht gemerkt hast.DEIN BEISPIEL:
Sterngeschwindigkeit 86164 Sekunden
Untersetzung Schnecke 1:144
Untersetzung Vorgetriebe 1:27
Gesammtuntersetzung 3888
Motorgeschwindigkeit 86164/3888 = 22,16152263374485
Schritte pro Umdrehung der Stundenachse = 3888 * 200 = 777600
Mikroschritte (16) pro Umdrehung der Stundenachse = 3888 * 200 * 16 = 12441600
Auflösung bei 16 Mikroschritte = (360 *60 *60) / 12441600 = 0,104166666666 Bogensekunden
So muss der Stepper in 22,16152263374485 Sekunden eine Umdrehung machen, um den Teleskop in 86164 Sekunden einmal zu drehen.
Motorgeschwindigkeit siderisch pro Sekunde = 200 Steps / 22,16152263374485 sec = 9,024650666171
So muss der Stepper 9,024650666171 Vollschritte pro Sekunde machen um mit Sterne laufen zu dürfen.
Jetzt in Mikroschritten = 9,024650666171 * 16(Mikroschritte) = 144,394410658736 Mikroschritte pro SekundeMit deinem heutigen Treiber muss du die Velocity angeben. Dass ist die Geschwindigkeit mit die dein Motor in eine Richtung laufen soll.
Die Velocity Auflösung deines Treibers ist 1 1/16 steps/secDies bedeutet aber dass dein Treiber dir dein Wert von 144,394410658736 aufrundet auf 144 oder 145.
So hast du ein Fehler von mindestens 0,39 Mikroschritte pro Sekunde!Ist dir dieser Fehler bewusst?
Gruß
Igor -
hi!
das war nur ein beispiel. mein teleskop hat 288 zähne in stunde, ein planetengetriebe mit 1:9, der motor hat 1.8° im vollschritt und ich kann 16 mikroschritte machen ...
lg
wolfi -
Hallo Wolfi,
ändert an meine Frage nichts.
DEIN BEISPIEL:
Sterngeschwindigkeit 86164 Sekunden
Untersetzung Schnecke 1:288
Untersetzung Vorgetriebe 1:9
Gesammtuntersetzung 2592
Motorgeschwindigkeit 86164/2592 = 33,24228395
Schritte pro Umdrehung der Stundenachse = 2592 * 200 = 518400
Mikroschritte (16) pro Umdrehung der Stundenachse = 2592 * 200 * 16 = 8294400
Auflösung bei 16 Mikroschritte = (360 *60 *60) / 12441600 = 0,15625 BogensekundenSo muss der Stepper in 33,24228395 Sekunden eine Umdrehung machen, um den Teleskop in 86164 Sekunden einmal zu drehen.
Motorgeschwindigkeit siderisch pro Sekunde = 200 Steps / 33,24228395 sec = 6,016433777
So muss der Stepper 6,016433777 Vollschritte pro Sekunde machen um mit Sterne laufen zu dürfen.
Jetzt in Mikroschritten = 6,016433777 * 16(Mikroschritte) = 96,262940 Mikroschritte pro SekundeMit deinem heutigen Treiber muss du die Velocity angeben. Dass ist die Geschwindigkeit mit die dein Motor in eine Richtung laufen soll.
Die Velocity Auflösung deines Treibers ist 1 1/16 steps/secDies bedeutet aber dass dein Treiber dir dein Wert von 96,262940 aufrundet auf 96 oder 97.
So hast du ein Fehler von mindestens 0,26 Mikroschritte pro Sekunde bis max 0,737 Mikroschritte pro SekundeHast du auf den Schirm, dass du nie perfekt den Stern hinterher laufen kannst?
Dass betrifft auch meine Steuerung.
Gruß
Igor -
hi!
ja, hat ja auch schon michael angesprochen. wenn ich runde, mache ich max. einen fehler von 0.5 mikrosteps/sekunde; sind 1800 mikrosteps pro stunde, also 7' pro stunde. da sind einnordungsfehler und und mechanische ungenaigkeiten nicht drin. wenn man will, kann man ja alle paar sekunden einen "schaltstep" einführen, so wie einen schalttag. glaube nicht, dass das eine riesenrolle spielt, die 7' wären bei meinem fernrohr und einem 4 mm UWA ca. das halbe gesichtsfeld - das ist glaub ich nicht so das drama...
lg
wolfi -
hi!
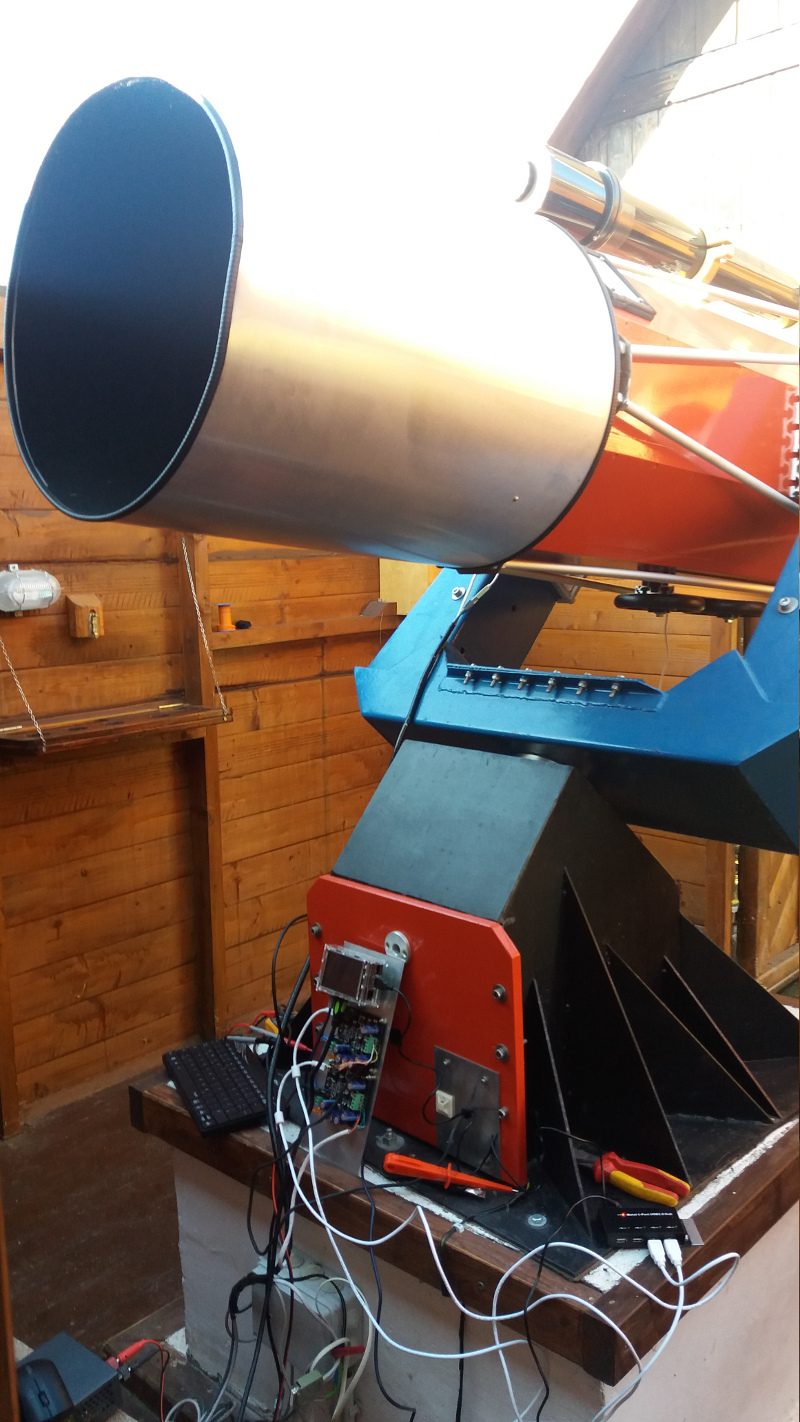
so ... jetzt hoffen wir amal auf schönes wetter am wochenende: ich darf vorstellen - asynchrones treiben zweier schrittmotoren mit 4 ampere spitzenstrom (eingestellt sind allerdings 1.5 A, das reicht für die motorln), nebst einlesen der qhy5 mit 1 sec belichtung Externer Inhalt www.youtube.comInhalte von externen Seiten werden ohne Ihre Zustimmung nicht automatisch geladen und angezeigt.Durch die Aktivierung der externen Inhalte erklären Sie sich damit einverstanden, dass personenbezogene Daten an Drittplattformen übermittelt werden. Mehr Informationen dazu haben wir in unserer Datenschutzerklärung zur Verfügung gestellt.
Externer Inhalt www.youtube.comInhalte von externen Seiten werden ohne Ihre Zustimmung nicht automatisch geladen und angezeigt.Durch die Aktivierung der externen Inhalte erklären Sie sich damit einverstanden, dass personenbezogene Daten an Drittplattformen übermittelt werden. Mehr Informationen dazu haben wir in unserer Datenschutzerklärung zur Verfügung gestellt.das sind die controls. das indi und kamerainterface sind sehr rudimentär noch

http://www.bilder-upload.eu/sh…ile=6b3820-1480539428.jpg
lg
wolfi -
hallo!
erster test ... die endstufen vertragen die geforderten 2.6A von meinen motoren ... und wenns auch noch einiges zu tun gibt, bin ich jetzt einfach einmal sehr happy und warte darauf, dass die sonne untergeht.hier ein kleines video von einm slew mit 100x geschwindigkeit -
Externer Inhalt www.youtube.comInhalte von externen Seiten werden ohne Ihre Zustimmung nicht automatisch geladen und angezeigt.Durch die Aktivierung der externen Inhalte erklären Sie sich damit einverstanden, dass personenbezogene Daten an Drittplattformen übermittelt werden. Mehr Informationen dazu haben wir in unserer Datenschutzerklärung zur Verfügung gestellt.der aufbau ist noch ein bisserl ein sauhaufen
lg
wolfips: edit -jetzt steht das bilderl auch richtig herum
-
Halo Wolfi,
schönes Gäbelchen hast Du! Sowas will ich mir auch noch bauen. Aktuell sitz mein 18er auf der Sideres. Siehe Video
-
sehr fesch! der nunchuk gefällt mir. das gäbelchen ist etwas grösser, weil das teleskop allein ca. 80 kg hat. ist ein houghton (so eine art maksutov newton), und der korrektor vorn wiegt schon so 16 kg ohne fassung ...
lg
wolfi -
Hi Wolfi,
das ist kein nunchuck. Das ist 5 Euro Teil aus der China-Rappelkiste für den Androiden. Zufällig läuft er unter Windows 10. Ok, mein Röhrchen wiegt 55 kg. Aber so in der Größenordnung wird die Gabel werden.
Hast Du sie selbst gebaut?
LG -
hi!
ja, ist ein eigenbau ... vermelde übrigens stolz, dass nachführung und goto zu gehen scheinen. progammieren im finstern bei der kälte kann garnix ...lg
wolfi -
Hi Wolfi,
sehr schön! Freut mich für Dich. Aber mach Dir das Leben nicht so schwer. Schau Dir ruhig die Onstep in Ruhe an. Dein Raspberry PI wird deswegen nicht arbeitslos.
Die Onstep unterstützt auch Gabelmontierungen. -
hi!
ich mach mir das leben nicht schwer, mir macht das spass:)
btw - gibts andere motortreiber als den raps 128? der ist leider nix für mich ... 2.2A sind zu wenig, die nanotecs wollen 2.6A.
lg wolfi -
Hallo Wolfi,
die können maximal 2.6 A essen Es kommt auch drauf an, wieviel Strom Du da durch jagst.
Selbst die SECM4 werden mit 2.8A angegeben (wenn ich mich recht erinnere), aber mit einem Phasenstrom von 1.8 Ampere (Pulsar Steuerung) laufen sie auch super gut.Ist doch beruhigend oder?
-
hi!
... zwischendurch a hardware-update. hab das chaos minimiert, zwei 7805 versorgen jetzt USB hub und raspberry, und die 12 V gehen an die stepper. LX200 INDI client folgt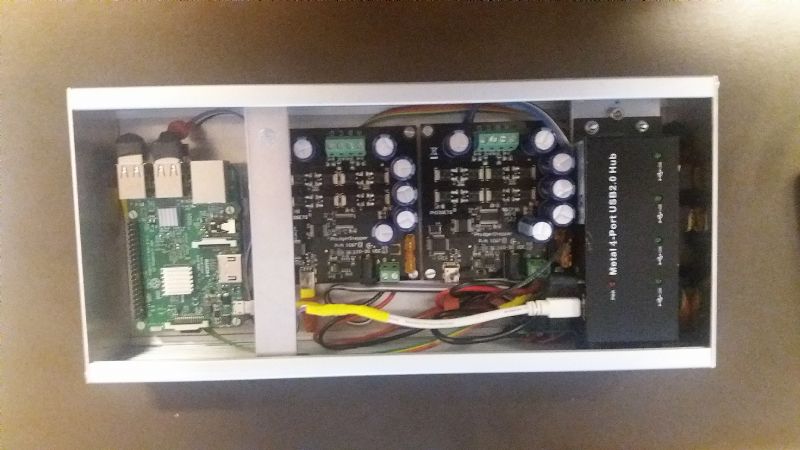
lg
wolfi -
Hallo Wolfi,
sieht schick aus! Wirst Du den Code veröffentlichen?
-
hi!
eh klar, da ist er - https://github.com/selste/TwoStepperControl
läuft jetzt eigentlich auch total stabil, ich klopf einmal ein LX200 interface noch dazu. als display möchte ich gern den 5" hdmi touchscreen von adafruit verwenden. https://www.adafruit.com/products/2260
das 3.2 zoll display ist lustig aber einfach zu klein ...
lg
wolfi
Jetzt mitmachen!
Sie haben noch kein Benutzerkonto auf unserer Seite? Registrieren Sie sich kostenlos und nehmen Sie an unserer Community teil!
