Hallo Leute, wir basteln uns gerade eine Montierung.
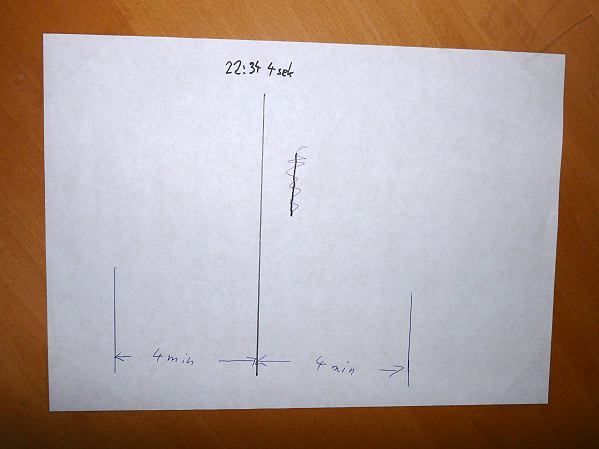
Für die Dauer einer Umdrehung der Stundenachse gehen wir von einer nötigen Zeitdauer von 23 Stunden 56 Minuten und 4 Sekunden aus.
Ist diese Angabe korrekt?
Derzeit erreichen wir eine Gangenauigkeit von ca. 35 Sekunden "zu schnell" pro komplette Umdrehung mit unserer Montierung.
In Prozenten ausgedrückt sind das etwa 0,04% Fehler.
Plastisch dargestellt:
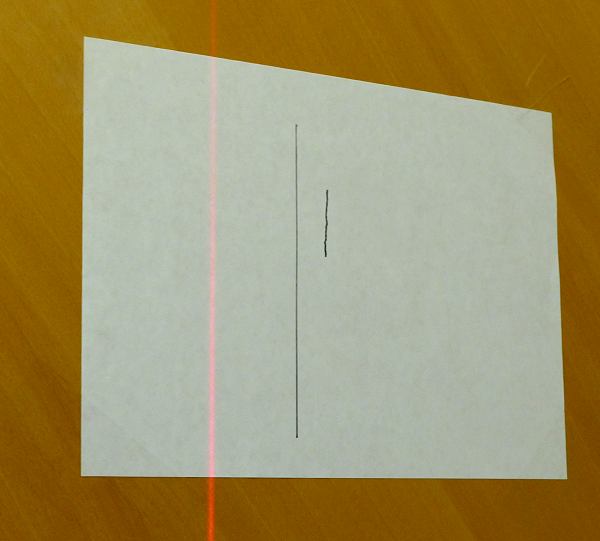
Wenn ein Stern ohne Nachführung einen 30mm langen Strich im Bild auf dem Monitor verursachen würde, dann wäre es mit Nachführung mit diesem Zeitfehler theoretisch eine Strichlänge von ca. 1,2 hundertstel Millimeter, also nicht sehr lang. ![]()
Natürlich ideale sonstige Rahmenbedinungen vorausgesetzt. Das es ne Menge weitere Einflussfaktoren ausser der reinen Gangenauigkeit gibt ist uns klar.
Durch Korrektur der Zeitbasis für die Schrittmotoransteuerung werden wir diese Gangungenauigkeit noch weiter reduzieren.
Basierend auf der eingesetzten Zeitbasis in Mikrosekunden können wir den Zeitfehler noch auf ca. 1/3 des aktuellen Wertes reduzieren. (Wir brauchen aber immer 24h um das zu kontrollieren.) ![]()
Was mich mal interessieren würde:
Wir haben das real an der Stundenachse mit einem sehr langen Zeiger ausgemessen.
Meine Frage ist ob das ausser uns Bekloppten auch schon mal jemand mit seiner Montierung so gemacht hat, also real nachgemessen wie schnell die Achse tatsächlich dreht und wenn ja mit welchem Ergebnis?
Grüße
Bernd