Hallo liebe Astro-Freunde,
ich bin vor kurzem in die Deep-Sky-Fotografie mit einer Canon 1000 d eingestiegen. Ich nutze dabei ein C 11 auf einer CGEM. Leider bereitet mir PHD etwas Kopfzerbrechen, da mir insbesondere die Dekl. mal nach unten und mal nach oben ausbricht - auch mit veränderten Werten....
Hat jemand für die CGEM Referenzeinstellungen, die er hier einmal posten mag?
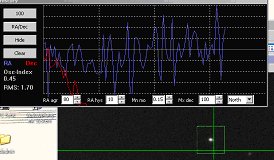
Bsp.: Habe heute auf M 42 nachgeführt. PHD arbeitet bei den Grundeinstellungen RAAgr. 80, RA Hy 10 Max. Dec 100, Calib. 300 gut - keine Probleme - saubere Kurven. Im Anschluss Testweise M 35 angefahren. Dekl.-Kurve driftet nach oben ab. Auch eine Veränderung der Werte in der Monti (schrittweise red. bis runter auf 10 % bei Dekl. hilft nicht - ebensowenig dec slope weight runter auf 1.00). Weiß jemand Rat oder hat jemand Erfahrung hiermit? Letzte Woche war es auch bei einer genauen Polausrichtung anders herum (Drift nach unten).
P.S. die Anleitung unter "funnytakes" habe ich.....
Beste Grüße