
Hallo,
nach dem ich letztes Jahr versucht habe auf einem Arduino Uno
eine GOTO-Steuerung mit dem LX200 Protokoll zu basteln und ich
leider an die Speichergrenzen des UNOs gestossen bin, habe ich mir nun einen Arduino Mega mit Touchscreen besorgt.
Mein Ziel ist es meine alte LX50 damit zu steuern und die Magellan II
zu ersetzen.
Dabei werde ich versuchen die Positionierung und Ausrichtung anstatt mit Winkelencodern mit einem Accelerometer zu bewerkstelligen.
Mal gucken.
Im Augenblick verwendete Komponenten:
- Arduino Mega 2560 Clone von Saintsmart mit Touchscreen
- PCF8574 für die Einstellung und Freigabe der Schrittmotoren
- 2 Pollolu Schrittmotortreiber A4988 mit maximal 2A Phasenstrom
- Eine DS1307 kompatible RTC-Clock mit Batteriepuffer
Fehlen tut noch die MPU6050.
Was im Augenblick funktioniert:
Eingabe und Speicherung von Lokaler Uhrzeit, Sommerzeit, Längengrad, Breitengrad, Höhe, Schrittmotorauflösung pro Achse, Getriebeübersetzung pro Achse, Schneckenübersetzung pro Achse.
Speicherung der Parameter in INI-Datei auf SD-Karte
Berechnung der Nachführfrequenz, Berechnung der lokalen Sternenzeit
und den julianischen Tag.
Nachführung geht nun wohl seit gestern auch.
Als nächstes bastele ich eine kleine Testmontierung zum ausprobieren.
Hier mal ein Bild vom Kabbelwirrwar auf meinem Tisch: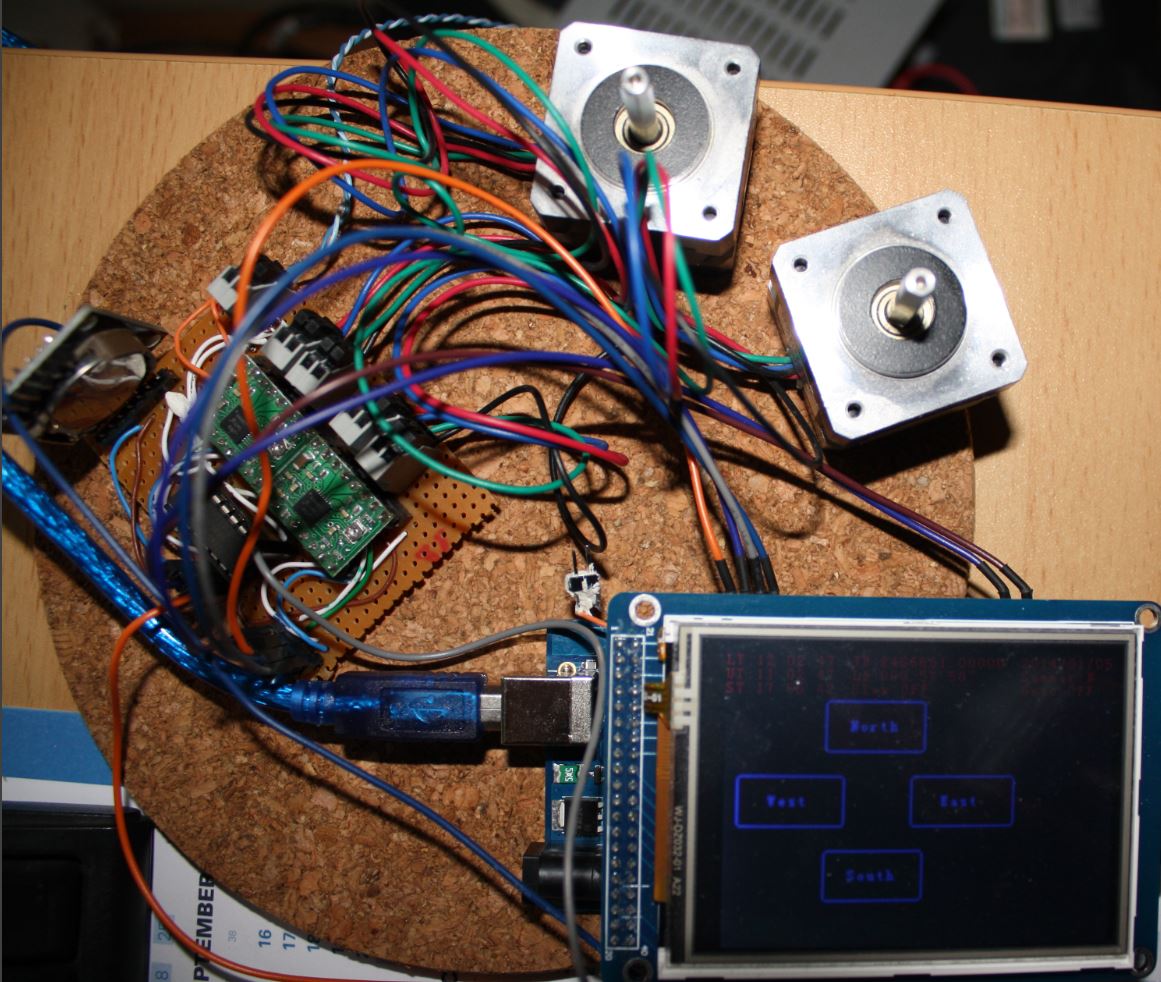
Und hier ein Bild vom Startbildschirm des Touchscreens:
Viele Grüsse
Peter
