hi!
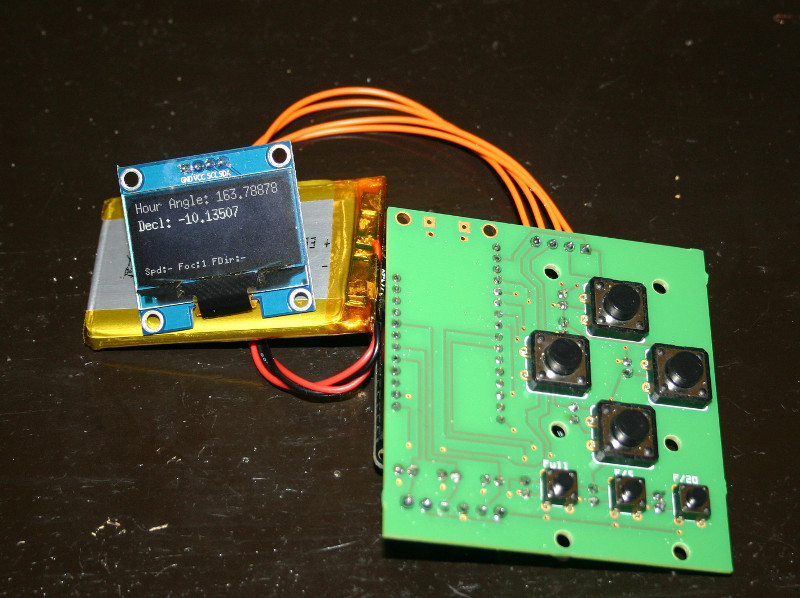
(==>)gert: plots - naja, ich hab mit 800x480 nicht soviel platz, ich zeige derzeit den maximalen fehler an und rechne laufend den RMS fehler mit (der auch angezeigt wird). derzeit gibt es die option, ein CSV-log, das man in excel anschauen kann (wenn man mag) abzuspeichern. die daten sind also da, und das zu visualisieren ist kein problem. ich will halt auch das user interface irgendwie kompakt halten. kann man aber für die zukunft andenken. PEC ist derzeit nicht drin, ist aber machbar. ich denke nur, dass der Autoguider das eigentlich auch ganz gut kann, und ausserdme würde man dann doch einen rotationsencoder brauchen ...
(==>)frank: naja, von programmiererseite hat man da etwas mehr freiheit. allerdings ist bluetooth etwas, was wir schon lang verdrängt haben. ich hab mir fast ein bisserl in die hose gemacht, als ich gesehen habe, wie ein bluetooth modul programmiert wird - nämlich mit hayes AT commands, wie ein modem (das hatte ich schon lang vergessen, uiuiui ...).
im grunde genommen ist BT eine ganz normale terminal kommunikation, wie anno damals mit dem nullmodemkabel. das lässt sich alles machen, und ich habe mich dabei fast wieder ganz jung gefühlt :D, aber es hat nachteile:
- es gibt kein internes handling, wenn die verbindung abreisst ... das muss die software machen, also port schliessen, schauen, ob das modul da ist, dann port wieder aufmachen etc. pp.
- es ist langsam
- das konfigurieren von dem HC05 modul ist gar nicht sooo trivial, weil man ersteinmal die MAC adresse auslesen muss
undsoweiterundsofort
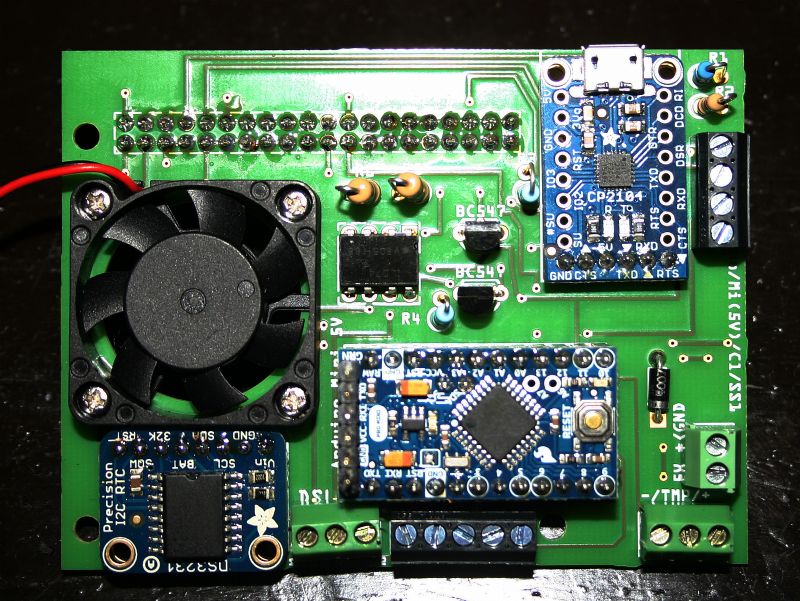
aus dem grund habe ich auch die LX200 kommunikation auf USB umgebaut. natürlich kriege ich noch terminalzeilen mit den LX commands, aber der konverter ist am raspberry und ich weiss wenigstens, was der macht. und wer hat noch einen PC mit RS232 schnittstelle?
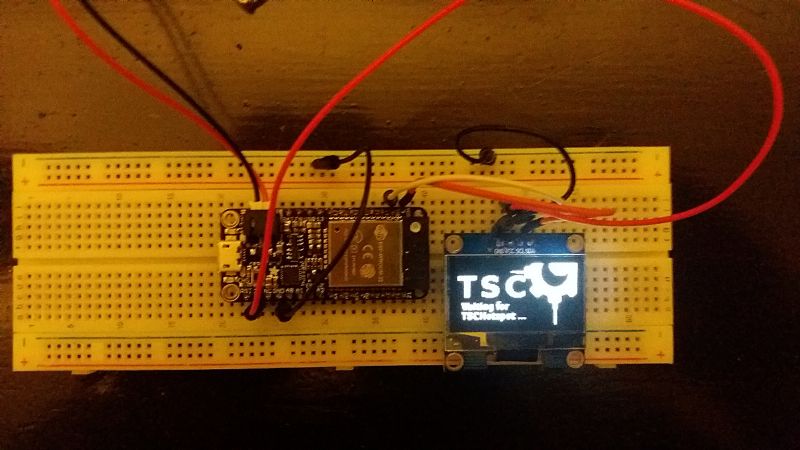
auf der anderen seite macht der pi ja ein lokales wlan auf, und das geht sehr gut (ich verwend nur mehr sky safari am tablet mit wlan und hab gar keinen laptop mehr in der sternwarte). und nette mikrocontroller mit wlan gibts ja auch (ESP Wroom, adafruit huzzah etc.). das wäre eigentlich keine affäre. das einzige, was mich etwas hemmt ist der umstand, dass die handbox dann ein display braucht, weil man evtl. eine TCP/IP adresse auswählen können muss. bluetooth ist halt leicht, wenns einmal konfiguriert ist ...
lg
wolfi