Hallo Igor,
ich bin mit meinem Aufbau auch soweit, dass ich erste Test´s im Labor machen konnte. Meine RA ist noch nicht soweit, daher habe ich erstmal die Dec getestet.
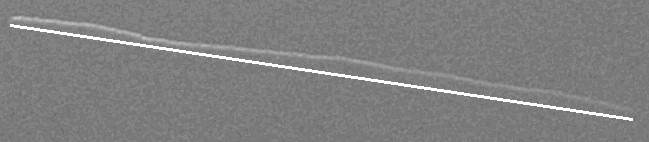
Meine Testbedingungen: Laserpointer auf der Drehachse befestigt und in gut 6m Entfernungt den Laserspot mit der Kamera von der Wand abgefilmt. Abstand Kamera-Wand ca. 30cm, Bildausschnitt nur wenige cm breit. Der Film ist mit 50Bildern/sec in Full-HD aufgezeichnet worden.
Aus dem Film von 60sec sind 53sec herausgeschnitten, damit die Kamera beim Ein- und Ausschalten nicht wackelt. Macht 53*50=2650 Einzelbilder.
Der Schrittmotor hat 200 Vollschritten, die Endstufe 512Mikroschritte/Step und mein Harmonic-Drive hat 1:100. Macht 10240000 Mikroschritte pro Umdrehung.
Für Nachführung müsste man die Endstufe eigentlich mit 10240000/86164=118,843..Hz ansteuern. Um die Mikroschritte den Bildern zuordnen zu können, habe ich die Endstufe mit 300Hz angesteuert. Bei den besagten 50Bildern/sec werden demnach 6 Mikroschritte pro Bild ausgeführt.
Von den 2650 Bildern waren nur 2630 zu gebrauchen, da der Laserpunkt danach zu nah am Bildrand war.
Die 2630 Bilder entsprechen 52,6sec Videozeit. Die Endstufen wurden mit 300Hz getaktet, macht in dieser Zeit 15780 Takte. Gleichzeitig wanderte der Laserspot in dieser Zeit 1740Pixel im Bild.
Die geometrische Auflösung beträgt demnach 10240000/15780*1740= 1129125,47529 Pixel/Umdrehung der Antriebsachse. Umgerechnet in Winkelsekunden: 360*3600/1129125,47529= 1,14779arcsec/Pixel.
Meine Überlegungen waren: da der Laserspot in der kurzen Zeit nur ca. 0,55° vom Kreisumfang abfährt, kann man die Bewegung als eine Gerade ansehen.
Also brauche ich nur die Abweichung der Laserspot-Position in Bezug zu einer Geraden zu betrachten. Die Differenz in Pixel kann dann direkt in einen Winkelfehler umgerechnet werden (Pixel*1,14779, s.o.)
Meine Auswertesoftware berechnet für jedes Bild die Abweichung in Bezug zum 1.Bild (d.h. wie viele Pixel ist der markierte Punkt gewandert)
Die Auswertung der Software ergab:
Bild 1 von 2650. Seite 0, Höhe 0 Pixel.
Bild 2 von 2650. Seite 1, Höhe 0 Pixel.
Bild 3 von 2650. Seite 1, Höhe 0 Pixel.
Bild 4 von 2650. Seite 2, Höhe 0 Pixel.
Bild 5 von 2650. Seite 2, Höhe 0 Pixel.
Bild 6 von 2650. Seite 4, Höhe 0 Pixel.
Bild 7 von 2650. Seite 4, Höhe 0 Pixel.
Bild 8 von 2650. Seite 5, Höhe 0 Pixel.
Bild 9 von 2650. Seite 6, Höhe 0 Pixel.
Bild 10 von 2650. Seite 6, Höhe 0 Pixel.
Bild 11 von 2650. Seite 7, Höhe 0 Pixel.
...
...
...
Bild 2625 von 2650. Seite 1736, Höhe 0 Pixel.
Bild 2626 von 2650. Seite 1736, Höhe 0 Pixel.
Bild 2627 von 2650. Seite 1737, Höhe 0 Pixel.
Bild 2628 von 2650. Seite 1738, Höhe 1 Pixel.
Bild 2629 von 2650. Seite 1738, Höhe 1 Pixel.
Bild 2630 von 2650. Seite 1740, Höhe 1 Pixel.
Bild 2631 von 2650. Seite 1740, Höhe 1 Pixel.
Bild 2632 von 2650. Seite 1741, Höhe 2 Pixel.
Bild 2633 von 2650. Seite 1742, Höhe 1 Pixel.
Bild 2634 von 2650. Seite 1742, Höhe 0 Pixel.
Bild 2635 von 2650. Seite 1743, Höhe 1 Pixel.
Eine Darstellung der Abweichung vom idealen Verlauf mit Excel ergab folgenden Verlauf:

Die Y-Achse mit -3 ... 7 sind die Abweichung in Pixel von der Geraden, Waagerecht sind die Bildnummern aufgetragen.
Die Achformatierung von 341,333 ergibt sich aus: 512 Mikroschritte/6Mikroschritte pro Bild = 85,3333 Bilder pro Vollschritt. Da immer 4 Vollschritte einen kompletten Zyklus bei einem 2-Phasen-Schrittmotor ergeben, habe ich dementsprechend 4*85,333=341,3333 genommen (wobei ich natürlich nur ganze Bilder hatte [:D]).
Die Periodizität der 4 Vollschritte zu einem Zyklus ist sehr gut erkennbar (was mich selbst überrascht hat).
Betrachtet man den Verlauf (und ignoriert einzelne, ganz kurze Peaks als Ausreißer (immerhin 50Bilder/sec)), ergibt sich eine Abweichung Peak-Peak von 6Pixel, heißt +/- 3Pixel vom Mittelwert.
Bei 1,14779 arcsec/Pixel ergibt das lediglich +/- 3,44arcsec innerhalb von <u><b>4 Vollschritten</b></u>.
Für mein Guiding bedeutet das: Schrittmotor mit 200 Vollschritten und HD mit 1:100, dabei aber nur alle 4 Vollschritte eine Korrektur: 200*100/4= 5000 Korrekturen pro Umdrehung.
D.h. 86164/5000 = frühestens alle 17,2328Sekunden ist eine Korrektur notwendig, um die Ungenauigkeiten vom Motor und vom Getriebe zu kompensieren. Da dies aber so schön periodisch ist, werde ich das Guiding genau auf diese Korrekturfrequenz legen.
Damit kann mein Detektor reichlich Photonen einsammeln, womit ein Guiding auch auf Lichtschwache Objekte möglich sein sollte.
Und wenn ich die Korrekturen genau in dieses Zeitraster lege, dürfte die Regelung insgesamt sehr ruhig verlaufen.
Eigentlich gar nicht mal so schlecht für diesen einfachen Aufbau mit einem Schrittmotor und direkt angekoppeltem HD.
Könnte man direkt für die RA einsetzen. Dabei ist dies nur meine Dec-Nachführung, die RA wird 2-Stufig. Aber zu Spielen schon mal nicht schlecht [;)].
Leider dauert das noch etwas, bis ich die RA auch aufgebaut habe [:(!].
Aber nach diesen ersten Test-Ergebnissen bin ich optimistisch, dass meine Gesamtkonstruktion funktionieren könnte.
Ich bin auch gespannt, wie es bei dir weitergeht.
Grüße
Sandor