Hallo zusammen,
ich habe jetzt aufgrund eurer Hinweise noch ein paar Erfahrungen sammeln können.
Ich habe versucht händisch zu guiden. Das klappt. Zwar nicht mit der Genauigkeit der Software und ich brauche dazu die Graphen, weil die Darstellung am Bildschirm einfach zu klein ist. Aber eine Korrektur in beide Richtungen (vor zurück) und in beiden Achsen (RA und Dec) klappt.
So weit so gut. Ich habe dann auch mal die Klemmung der Schnecken gelöst und habe exakt die gleiche Ansprechgeschwindigkeit registriert. Daran lags also nicht. Was wirklich was gebracht hat war die Abschaltung der Anfahrrampen. Die Achsen können nun also schneller reagieren.
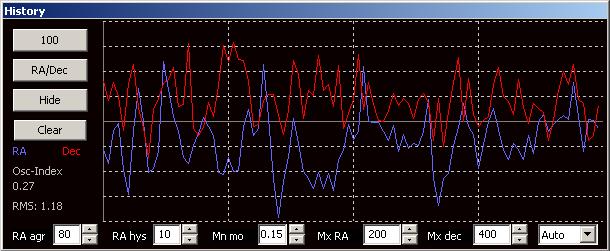
Hier mal zwei Kurven:
und etwas später: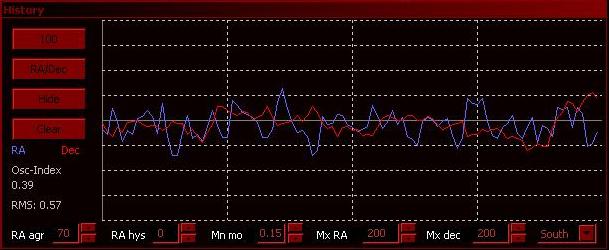
Was ich bemerkenswert finde: die unruhige Bewegung der roten Linie ÜBERHALB der Nulllinie, obwohl ich auf "South" stehen hatte. Das bedeutet Korrekturbewegungen der Deklinationsachse gehen nur in eine Richtung (nach oben).
Wenn die rote Linie oberhalb der Nullinie zittert weist das darauf hin, dass sich hier das Seeing bemerkbar macht, weil ja dann PHD nicht eingreift. Dass dieses Zittern dann auch noch recht groß ist, ermutigt mich etwas, das die Luftunruhe wohl doch mehr zu meinen Fehlern beiträgt, als ich gedacht hatte.
Problem ist noch die blaue Line. Die springt nämlich manchmal immer ncoh wild umher. Eigentlich sind Korrekturbewegungen in RA total unkritisch. In Dec kann ich ja nur Schrittweise meine POsition verändern. Dadurch, dass RA ständig Schritte geht und ich die Zeitunterschiede(Korrekturgeschwindigkeit) zwischen den Schritten ja fast variabel klein machen kann, müsste eine Korektur in RA einfacher zu realisieren sein.) Vielleicht versuche ich beim nächsten mal einfach, den Korrekturfaktor für RA noch weiter runterzudrehen, damit Korrekturbewegungen nciht mehr so drastische Auswirkungen haben, dass sie eine Überkorrektur verursachen.
Am 200/1000 Newton kam dann letzte Nacht das bei der Canon an:

Ganz okay, aber ich habe eben auch schonmal so eine Aufnahme gemacht (wesentlich kleinerer Bildausschnitt):

und da habe ich PHD mit seinen Standardeinstellungen gefahren, ohne zu wissen, wofür die ganzen Einstellungen sind! Das guiding lag hier deutlich unter 0.5 RMS! Vielleicht hatte ich an dem Abend einfach ein sensationelles Seeeing gehabt und die Korrektur hat (mit seinen überseteuernden, trägen komponenten) nicht eingreifen müssen (oder selten genug).
Was ich noch ausschalten werde ist die Time Lapse von 100ms. Vielleicht schießt mir die auch ncoh ein bsischen dazwischen!
Ich werde weiter berichten. Vielen Dank für eure Tips!
Viele Grüße
Michael