Hallo zusammen,
vielen Dank für eure Antworten! Ich war gerade nicht zu Hause, deshalb hat's etwas gedauert.
(==>)Jogi: Ich weiss nicht, wie der genaue Typ 3D-Drucker heisst. An meiner Hochschule gibt's einige Drucker und man kann da gegen Bezahlung Dinge in Auftrag geben. Habe einige Ausdrucke gesehen und es hat mich nicht überzeugt für meine Anwendung.
(==>)universe: Danke für's Einklinken. Ich schreibe natürlich hier, weil ich auf Meinungen und Vorschläge von Leuten mit Erfahrung gehofft habe.
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote">So zum Beispiel das aufbohren von Zahnriemenscheiben.
Die solltest du seeehr genau machen, nicht aufbohren sondern aufdrehen.<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
Ich hatte nicht vor, Zahnriemenscheiben aufzubohren. Der Plan bis jetzt sieht vor, die Zahnriemenscheiben ganz selber zu machen! Das mag schwierig sein, ganz verworfen habe ich den Plan aber noch nicht. Diese Woche werde ich nochmals einen Test machen, mit verbessertem Vorgehen (Infos folgen dann). Danach entscheide ich, ob ich das so machen werde oder eine andere Lösung suche.
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote">Du berechnest diese zu eine bestimmte Optik was schon mal nicht so optimal ist.<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
Bis jetzt verstand ich eben das optische Kriterium als Grundlage für die Auslegung der Motorisierung. Gerrit hat mir das in seinen Posts nochmals nahegelegt. Was ist dein Kriterium für die Motorisierung? So wie ich deinen Post lese orientierst du dich v.a. an der Geschwindigkeit.
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote">Außerdem die Verwendung von Vollschritten heutzutage ist wirklich nicht up to date.<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
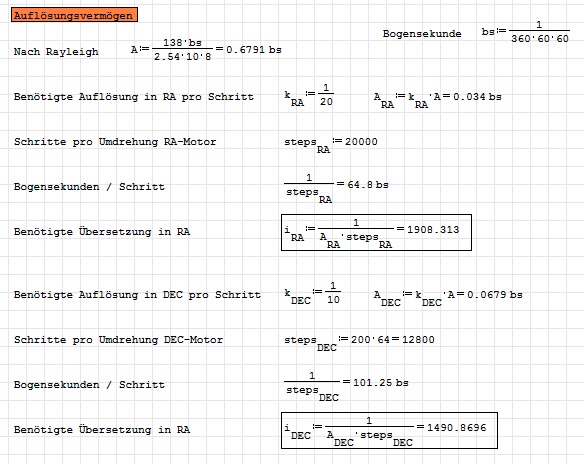
Ich habe mit 64 Mikroschritten gerechnet. Im Bild von meinem Post vom 02.12.2015 steht "Schritte pro Umdrehungen DEC-Motor 200*64".
Ob ich auch 128 Mikroschritte mit meiner Steuerung fahren kann, muss ich noch nachlesen.
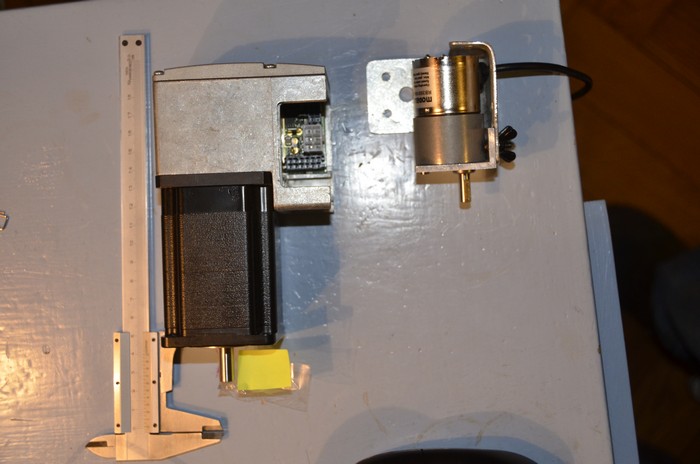
Beim Berger Lahr Motor mit integrierter Steuerung (Vorgesehen für RA-Achse) kann ich nicht wählen, ob ich Mikroschritte fahren will. Das macht dann die Steuerung automatisch. Das Protokoll lässt mich aber z.B. den Motor auf 1/20'000 Umdrehung genau positionieren. Wie die Mikroschritte da genau realisiert sind, weiss ich nicht.
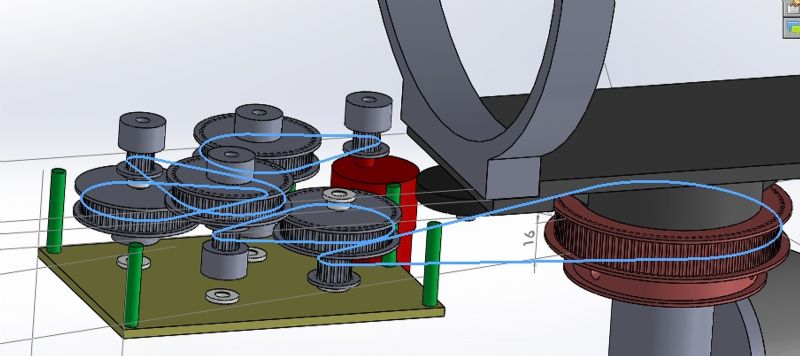
Den Input vom Harmonic Drive schaue ich mir noch genauer an! Danke dafür. Das Spiel beim Planetengetriebe ist mir bekannt. Geringes mechanisches Spiel kann ich softwaremässig relativ gut kompensieren.
Grüsse,
Bruno