
Hallo Selbstbauer,
nachdem ich nun schon einige Zeit im Forum angemeldet bin und mir viele Infos von Euch geholt habe, möchte ich auch mal einen Beitrag bringen, der evtl. anderen weiterhilft oder ihnen Anregungen gibt.
Vorweg:
Ich bin GoTo-Fan, somit nicht unbedingt für Dobsons geeignet.
Außerdem mag ich es, wenn das Teleskop nachgeführt wird.
Den 14“ Orion (UK) Dobson habe ich mir eigentlich für meine Deutsche Montierung (Eigenbau) gekauft.
Die Monti betreibe ich mit dem Skysensor.
Die Monti ist „halbstationär“ auf einer rollbaren Säule. Das Ganze wiegt mit 2 Teleskopen ca. 150 Kg und ist somit nicht wirklich transportabel.
(steht im 2. Stock, ich beobachte meist von unserem Dachbalkon aus)
Für Teleskoptreffen musste also eine transportable Lösung her.
Vor dem Kauf des Dobsons habe ich in der SUW diesen Artikel gelesen:
http://www.ernst-von-voigt.de/articles/suw-07-2003.html
Das gab bei mir den Ausschlag, den Orion als Dobson zu kaufen und später zu motorisieren.
Vielen Dank an Herrn Von Voigt, er hat mir mit Daten bei der Beschaffung der Motoren geholfen.
Ich habe die Maxon Motoren von oben genanntem Link verwendet.
Bei der Realisierung des GoTo-Dobs hatte ich mit einigen Problemen zu kämpfen:
Zahnriementriebe und Schneckengetriebe in der benötigten Größe waren mir zu teuer.
Außerdem wollte ich eine Konstruktion, bei der ich den Tubus einfach in die Rockerbox einlege wie bei einem normalen Dobson.
Also habe ich mich mit der Reibradlösung beschäftigt.
Aber: Wie die benötigten hohen Anpresskräfte realisieren?
Da kam mir mein Sohn Uwe (damals 9 Jahre alt) zu Hilfe:
Zitat: „Wieso machst Du nicht auf beide Scheiben so etwas wie hier?“
Er meinte ein Rändel.
Als Berufsmetaller ist so ein pseudo-Zahntrieb für mich natürlich eine Murkskonstruktion.[V]
Aber ich habe mich mit der Idee beschäftigt.
Ein bisschen gerechnet und beschlossen, dass der geringe Aufwand einen Versuch wert ist.
Ich habe dann ein Rändel DIN 82-RAA 05 verwendet.
Ein genaues Übersetzungsverhältnis mit spanlos gefertigten Rändeln herzustellen ist fast nicht möglich, da der „Teilkreisdurchmesser“ auf 1/100 Millimeter stimmen sollte.
Da ich das Rändel nur spanlos herstellen kann, ist der GENAUE Durchmesser ein Zufallsprodukt.
Aber: Die Übersetzungen im Skysensor sind ganzzahlig frei programmierbar.
Meine Motoren haben ein Getriebe von 900:1, das 2. Getriebe ist dann der „Reiradantrieb“.
Folglich kann ich das richtige Übersetzungsverhältnis mit maximalen Fehlern von 360°/900=0,4°, somit 0,05° theoretische Abweichung auf einen 90° Schwenk im Skysensor programmieren.
Damit ist klar, dass der Teilkreisdurchmesser nicht so entscheidend ist.
Hochgenau sollte das Ganze nicht unbedingt werden, Hauptsache die Nachführung funktioniert.
Das bisschen „Finden“ kriege ich schon noch hin!?
Das zweite Problem war das Getriebespiel. Ich wollte ja keinen Wackeldobson.
An der Höhenachse ist das kein Problem.
Der Newton ist nicht ausbalanciert montiert, er hat Übergewicht nach hinten.
Außerdem habe ich die Höhenräder von der waagerechten Tubusachse aus gesehen nach unten verschoben, damit auch bei Beobachtungen im Zenit ein Ungleichgewicht herrscht und das Getriebe auf Anschlag ist.
Bei der Azimutachse habe ich die 3 Auflagepunkte so gestaltet:
1. gerändelter „Reibradantrieb“
2. Gleitfläche Teflon / Alu
3. kugelgelagerte Rolle aus Kunststoff
Somit ist die Azimutachse reibungsbehaftet.
Das Getriebespiel kann im Skysensor programmiert werden und es wackelt nichts.
So weit, so gut.[:)]
Beim ITV 2008 hatte ich die BETA-Test Version des Dob dabei.
Zuhause hatte noch alles prima funktioniert.
Doch auf dem ITV hätte mein Dob von mir fast den Spitznamen „Blue-Eye-Dob“ bekommen.
In unregelmäßigen Zeitabständen gab es in der Höhenachse zitternde Korrekturbewegungen.
Manchmal war 1/2 Std. alles OK, manchmal alle paar Minuten eine oder mehrere Korrekturbewegungen.
Auslenkung am OAZ bis zu ca.+/- 2 Zentimeter!
Was ist los, was tun?[:0]
Ich habe mit Leuten geredet, die sich mit Montierungssteuerungen auskennen.
Mein Verdacht war, dass das Massenträgheitsmoment Tubus / Motor zu hoch ist.
Ergebnis: Das kann nicht sein.
Beruflich habe ich am Rande auch mit Servomotoren zu tun.
Somit bin ich meinem eigenen Verdacht, daß das Massenträgheitsmoment für die Motoren zu groß ist, nachgegangen.
Ich habe das Untersetzungsverhältnis der Höhenachse drastisch erhöht, also das Antriebsrad des Höhenrades im Durchmesser wesentlich verkleinert.
Jetzt ist die Gesamtuntersetzung 12600:1.
Und siehe da: ALLES BESTENS (Puuuh)[8D]
Inzwischen habe ich noch den Azimutmotor weg von der Grundplatte an die Rockerbox geschraubt, damit sich alle Kabel gemeinsam mit der Box drehen und deshalb eine neue Grundplatte gebaut.
Die ersten Versuche mit einer leichten, selbstgebauten Grundplatte aus Holz waren nicht OK.
Die Tests am Himmel waren absolut „selbst zensiert“.
Die Ursache: Ich hatte ca. 0,3 mm Abweichung in der Ebenheit der Grundplatte.
Viel zu viel für meine gewünschte Genauigkeit.
Also habe ich in den sauren Apfel gebissen, und habe mir beim Alu-Händler meines Vertrauens eine 20mm dicke, planparallel bearbeitete Platte geholt.
Übrigens: Das 6-Eck der Platte ist (wie auch die meisten Platten meiner Eigenbau-Monti) nur auf meiner Holzkreissäge gesägt. (mit Sägeblatt für Alu)
Jetzt funkts.

Gesamtansicht
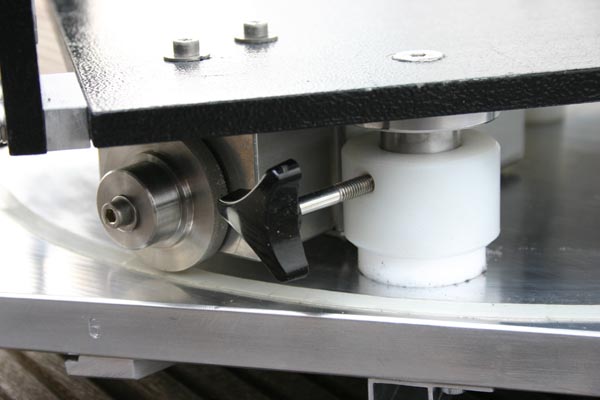
Azimutantrieb

Höhenantrieb ohne Höhenrad
Noch ein Hinweis, den ich vorher übersehen habe:
Die „Gegenlauffläche“ des Azimutantriebes ist PET-„Folie“, 1mm dick, aufgeklebt auf die Grundplatte. (gibt’s in den Baumärkten) Damit können sich die Zähne der Rändel eingraben.
Beim Höhenantrieb sind beide Räder gerändelt.
Das Antriebsrad und die Lagerrolle (alle 3 Lagerrollen sind kugelgelagert) fürs Höhenrad habe ich relativ hoch gelegt.
Damit drückt das Höhenrad mit ca. 350N auf das Antriebsrad obwohl der Tubus nur 23 Kg wiegt.
Ach ja, die richtigen Getriebeparameter im Skysensor zu programmieren hat mir auch Sorgen gemacht.
Am Stern geht es nicht, da der Skys. intern die Fehler verrechnet.
Somit ist unklar, was wirklich Sache ist.
Man muss die Achsen getrennt voneinander testen / messen.
Deshalb habe ich die Azimutachse mit einem Laser ausprobiert und korrigiert.
Laser aufs Teleskop, Laser möglichst weit entfernt auf eine Wand projizieren, markieren, von verschiedenen Seiten anfahren wegen dem zu programmierenden Getriebespiel, im Skys., 360° drehen (laut Display Skys.), Abweichung von Markierung messen, neue Getriebeübersetzung berechnen…
Das geht noch einfach. Wie aber die Höhenachse testen / messen?
Ich habe mir von meinem Arbeitgeber 2 hochgenaue Maschinenwasserwaagen ausgeliehen (diese zeigen Abweichungen von wenigen 1/100mm auf 1m Länge an, eine davon war eine quadratische Rahmenwasserwaage), diese auf dem Höhenrad 90° zueinander gespannt und dann nach den Libellen getestet und programmiert.
Im „Trockendock“ bin ich jetzt bei Abweichungen von 3/100° bei einem 90° Schwenk an beiden Achsen.
In der Praxis funktioniert es für mich ausreichend gut.
Die Nachführung ist für mich allemal ausreichend genau.
Beim GoTo sind Objekte im Zenit manchmal allerdings am Rand des kleinsten Kreises vom Telrad.
Das ist wesentlich mehr Abweichung als 3/100°.
Das hängt evtl. mit der rechtwinkeligkeit der (Teleskop und Rockerbox) Achsen und der ebenen Aufstellung der Rockerbox zusammen?
Bei Objekten die nicht im Zenit sind, z.B. 45° Höhe, habe ich minimale Abweichungen im Fadenkreuzokular bei Schwenks von einem zum anderen Objekt.
Die entsprechen ungefähr den theoretischen Berechnungen.
Jedenfalls habe ich beschlossen, dass es so bleibt.
Na ja, vielleicht probiere ich auf dem ITV 2009 noch eine andere programmierte Höhenübersetzung aus???
Ach ja, jede Achse hat eine „Kupplung“ mit der das Antriebsrad von der Antriebsfläche abgehoben werden kann.
Damit kann ich auch ohne Motor von Hand schwenken.
Oh je, der Text wurde ewig lang, hoffentlich liest das noch jemand.
Liebe Grüße
Uli



