
<font face="Arial">Servus in die Gemeinde,
vor etwa fünf Jahren hatte ich den Bau eines 500 mm Newton vorgestellt.
http://www.astrotreff.de/topic…HIVE=true&TOPIC_ID=188623 ,
welcher „möglichst rasch“ auch eine parallaktische Montierung erhalten sollte …
… so war der Plan, aber dann kam mir die Radioastronomie „in die Quere“ und in den Folgejahren wurde zunächst eine 4 m Schüssel (Holzbauweise) realisiert:


Diese ist nun fertiggestellt; incl. der Signalkette, sodass es nun mit dem Newton weitergehen kann; insbesondere ob der kommenden Mars-Opposition im Oktober.
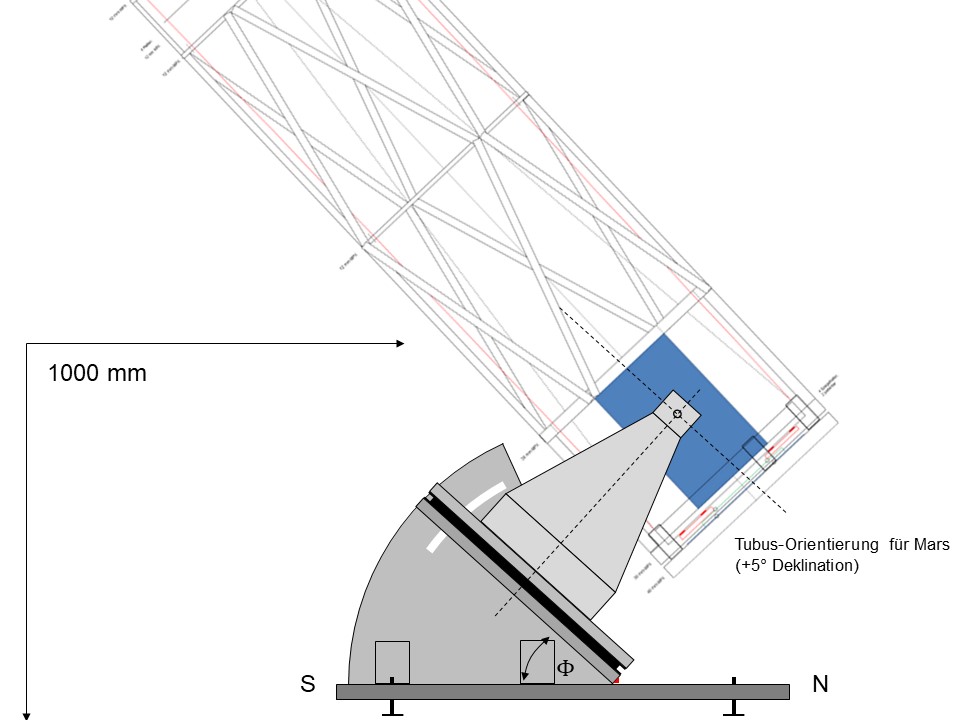
Das damalige Konzept einer Gabelmontierung wurde vom Ansatz her beibehalten und stellt sich aktuell wie folgt dar:

OK, es baut a bisserl hoch; bei der im Oktober zu erwarteten 30° Elevation im Westen (Mars & Mond) wird jedoch bequemer Betrieb am Okular gewährleistet sein; also keine Leiter, etc. erforderlich. Blick nach Süden ist durch zahleiche Bäume blockiert und diesen "Saurier" möchte ich nicht eben jede Nacht durch die Gegend fahren .
Der 500 mm Newton - in seinen Achsen sauber austariert - ruht mit seiner Deklinationsachse in den Lagern der Gabeln. Diese sind auf einer Drehscheibe montiert, welche samt Antriebsscheibe auf einer entsprechend der lokalen Zenitdistanz geneigten Zwischenplatte gelagert ist.
Die Neigung dieser Zwischenplatte ermöglicht - rein geographisch - einen Betrieb von La Palma bis Hamburg.
Diese Zwischenplatte ist (wie es der Name bereits andeutet) zwischen zwei Bogenplatten geklemmt, welche auf einer massiven Bodenplatte angebracht sind. Diese Klemmung erfolgt verzugsfrei durch zwei quer verlaufende M12-Gewindestangen (siehe Bilder weiter unten).
Die Bodenplatte mit dem gesamten Aufbau ruht auf drei regulierbaren M12-Stellfüßen (einer im Süden und zwei im Norden in der Nähe des Schwerpunktes). Hierdurch kann das gesamte System mit Hilfe einer längeren Wasserwaage rasch nivelliert werden.
Der Antrieb der Stundenachse erfolgt durch einen Schrittmotor; welcher im Mikroschritt-Betrieb (0,1125°/ Schritt) gefahren wird.
Mittels eines angeflanschten dreistufigen Planetengetriebes (512:1) sowie einer weiteren Untersetzung (6,6:1) zwischen der Motor-/Getriebeeinheit und der Stundenachse wird die Drehzahl soweit reduziert, dass bei 125 Mikroschritten / s (Motorachse) die erforderlichen 15° / h an der Stundenachse erreicht werden.
Schneller Vor- und Rücklauf erfolgen bei 30 kHz --> ±1°/s.
Dieser Schrittmotor wird „old fashion“ mit einem ältlichen Signalgenerator (Röhren) betrieben,

also ohne großartiges „Computergedöns“ oder gar GPS-gesteuerte Zeitbasis.
Für die Aufnahme von kurzen Videos von Planeten bzw. Mond genügt die aktuell erreichbare Nachführgenauigkeit absolut.
Zusätzlich: Diese röhrenbetriebenen Geräte verfügen nach ihrer Aufwärmzeit über eine sehr hohe Frequenzstabilität.
Das Signal für den Schrittmotor wird zusätzlich durch einen kleinen Frequenzzähler überwacht. Dieses kleine Gerät wurde für wenige Euros aus der „Bucht“ gefischt und ist extrem robust (ehemaliger Einsatz im Untertagebau).

Maximale Auflösung im Display: 0,01 Hz bei besagten 125 Hz nomineller Frequenz völlig ausreichend.
Verbleibende Restfehler der gesamten Nachführung im Laufe der Videoclips werden während der Aufnahmen durch FireCapture oder später z.B. durch PIPP bestens ausgeglichen.
„Päpste“ aus dem Bereich von Nachführgenauigkeiten, etc. mögen hier mäkeln, dass man grundsätzlich mit maximal erreichbarer mechanischer Präzision zu arbeiten habe…
… jedoch, bei einem Teleskop dieser Größenordnung wird solches Ansinnen rein finanziell sehr schnell gedämpft (gedankliche niederohmige Erdung).
Selber vertrete ich die Meinung, dass stets ein sinnvoller Kompromiss zwischen erwarteter Gesamtleistung (einschließlich Nachbearbeitung) und zu erwartenden Kosten zu erreichen ist.
Noch eine Bemerkung zu der 6,6:1 Untersetzung hinter dem Planetengetriebe: Hier kommen zwei Bandräder mit seitlichen Fassungen zum Einsatz (Ø 100 mm im Abtrieb (Planetengetriebe) und Ø 660 mm im Antrieb (Stundenachse). Diese sind unter Zugspannung durch ein dünnes Stahlband (0,05 mm x 12,7 mm) verbunden (siehe unten).
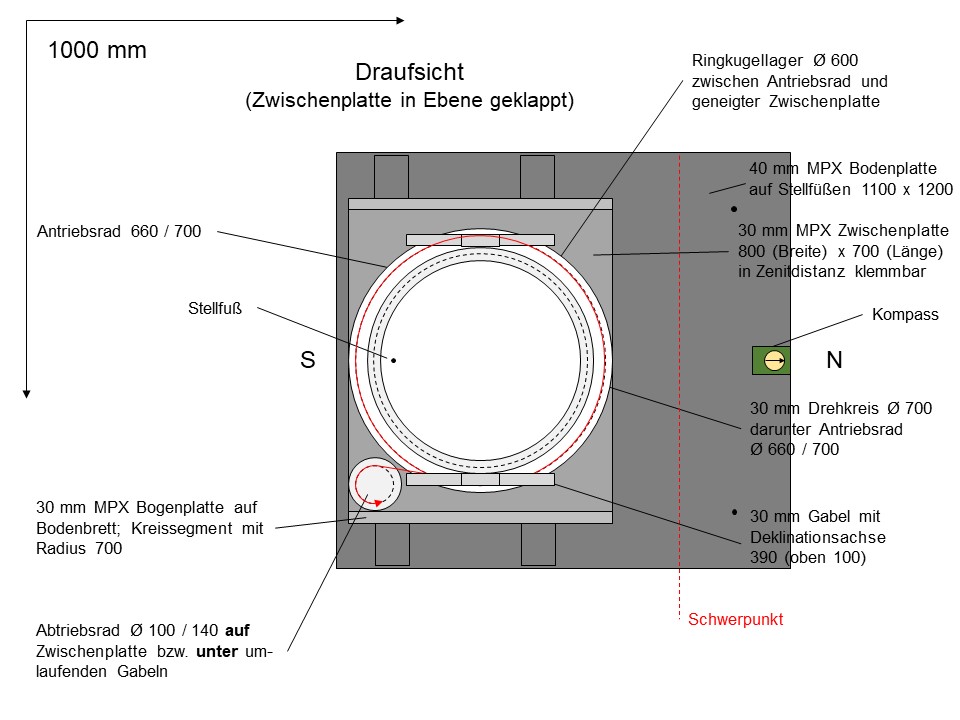
Die folgende Abbildung zeigt den Querschnitt des gesamten Antriebes (südöstliche Seite der Zwischenplatte).
Ganz unten die entsprechend der lokalen Zenitdistanz gelagerte Zwischenplatte (700 mm x 800 mm). Darüber das 14 mm hohe Kugel-Ringlager (Ø 600 mm), die Antriebsrolle (Ø 660 mm) sowie der Drehkreis der Stundenachse (Ø 700 mm) mit den darauf montierten Gabeln.

Wie oben bereits angesprochen sind Abtriebsrolle und Antriebsrolle durch ein dünnes Stahlband (0,05 mm dick, 12,5 mm breit und 10 m lang) miteinander verbunden. Dessen Zugfestigkeit ist enorm (ca. 400 N); genügt also den hiesigen Anforderungen bei Weitem.
Dieses Stahlband ist zu Beginn einer Beobachtung auf der größeren Antriebsrolle (Stundenachse) aufgerollt (4 Wicklungen) und wird während der Beobachtungszeit langsam auf die kleinere Abtriebsrolle (Planetengetriebe) aufgewickelt (anfänglich 12 Wicklungen).
Eine - auf diese Antriebsrolle wirkende - Bandbremse sorgt für gleichbleibende mechanische Zugspannung am Stahlband.
Die Antriebsrolle ist hierbei zusätzlich gegen die Zugrichtung federbelastet. Durch diese Federspannung ist auch ruck- und spielfreier schneller Vor- bzw. Rücklauf gewährleistet.
Insgesamt handelt es sich - von der Motorachse bis zur Stundenachse - um einen vorgespannten sowie ineleastischen Antrieb, wodurch Winkelspiel an der Stundenachse bis in den Bereich der operationellen Bedeutungslosigkeit reduziert wird – bei vergleichsweise überschaubaren Kosten.
Der Effekt des langsam zunehmenden Durchmessers der Antriebsrolle (Aufwickeln des 0,05 mm Stahlbandes --> „Spiraleffekt“) kann zumindest bei den kurzen Belichtungszeiten im Bereich der Planeten- bzw. Mondphotographie vernachlässigt werden. Nötigenfalls kann die Frequenz des Funktionsgenerator entsprechend angepasst werden.
Dieses Zugbandsystem ist – besonders bei der Realisierung größerer parallaktischer Montierungen – weitaus günstiger als ein entsprechend großes Schneckengetriebe und ist zudem frei von Schlupf (Reibradantrieb) und anderen mechanischen Störgrößen.
Aktuell ist die Deklinationsache noch mit einer einfachen Knebelklemmung versehen; hier ist eine Feineinstellung nachzurüsten.
Beim Bau dieser Montierung kommen vorwiegend MPX-Platten (30 mm bzw. 40 mm) zum Einsatz, da sich dieses Material als extrem verwindungssteif und belastbar bewährt hat.
Bringt jedoch einen gewissen Nachteil mit sich: Die Masse des gesamten Teleskops wird bei ca. 200 kg liegen. Allein die 40 mm Bodenplatte bringt über 42 kg auf die Waage. Dennoch kann das gesamte System in einem Pkw-Kombi mit gescheitem Kofferraum-Volumen (z.B. Skoda Suberb) problemlos transportiert werden.
Die Aufbauzeit der Montierung vor Ort beträgt ca. 1 Stunde – plus Zeit zur Justierung des Newton selbst (weitere 60 Minuten); also recht überschaubar.
Die ganze Sache ist und wird angesichts der teilweise schweren Komponenten eine gewisse „Plackerei“ bleiben; macht aber nix #128522; . Nachfolgend erste Bilder des gesamten Unterbaus (Bodenplatte bis zur Gabel); die neuen Komponenten sind noch nicht lackiert.
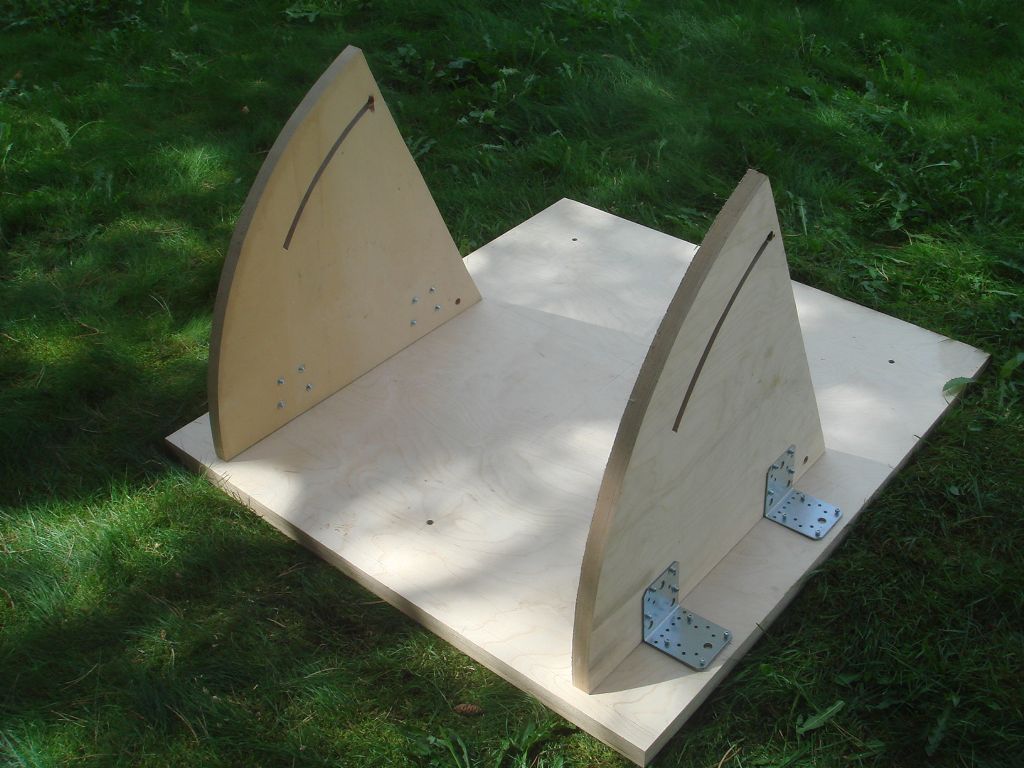
<b><i>Bodenplatte und seitliche Bogenplatten (Sicht: Südost nach Nordwest).</i></b>

<b><i>Vollständiger Unterbau einschließlich Gabeln (Sicht: Südost nach Nordwest).</i></b>
Im Betrieb wird das gesamte System natürlich auf einem fixen Untergrund (Terrasse) gelagert sein !
<b>Wichtig: Der Newton selbst ist vollständig austariert, d.h. sein Schwerpunkt liegt im Kreuzungspunkt von Deklinations- und Stundenachse. Somit treten auch innerhalb der Montierung keinerlei Querkräfte auf.</b>
Weitere Bilder zum Ende der kommenden Woche.
In den nächsten Monaten vor der Mars-Opposition wird das gesamte System mehrere Verifikationen durchlaufen; incl. der vorgesehenen Kamera (72AUC02).
Hierzu wurde bewusst dieses (ältliche) Exemplar gewählt, da es über einen Chip mit extrem kleinen Pixeln verfügt (2,2 µm x 2,2 µm).
<b>Frage in die Gemeinde: Kennt Jemand eine Kamera mit noch höherer geometrischer Pixel-Auflösung ?</b> Danke vorab für Hinweise !
Bis zum nächsten Update,
derweil viele Grüße
Volker
</font id="Arial">
