Hallo,
gestern bin ich mit dem Bau der Equatorial- Plattform für mein 16 Zoll Dobson fertig geworden.

Die Plattform vor der ihrer Basis beraubten Rockerbox.
Ich habe die Bauart mit senkrecht stehenden Nordsegmenten gewählt.
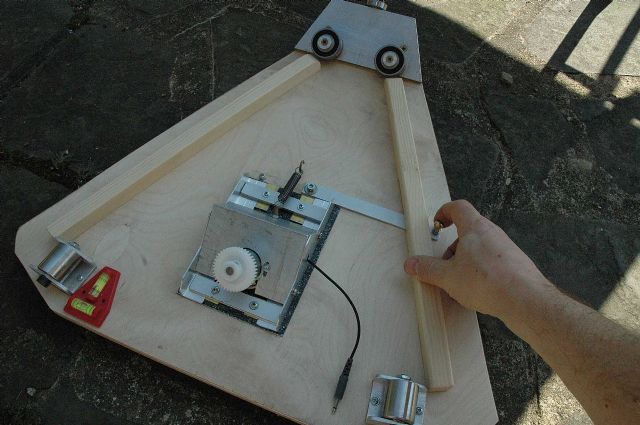
Da die Kurven dieser Segmente keine Kreisbögen sind, mußte ich zum Fräsen eine Vorrichtung bauen:

Zum Fräsen der Segmente schwenkt die Plattform um das Alurohr.
Dieses befindet sich dort, wo später die Achse ist, um die beim Nachführen geschwenkt wird. Die Linearführung habe ich in der Firma aus dem Schrottcontainer gezogen, damit kann man die Oberfräse genau in der jeweils erforderlichen Höhe positionieren.
Die Oberfräse ist am zweckentfremdeten Oberschlitten meiner Drehbank befestigt, dieser kann auf der Aluplatte gedreht und für alle drei Kurven fein zugestellt werden.
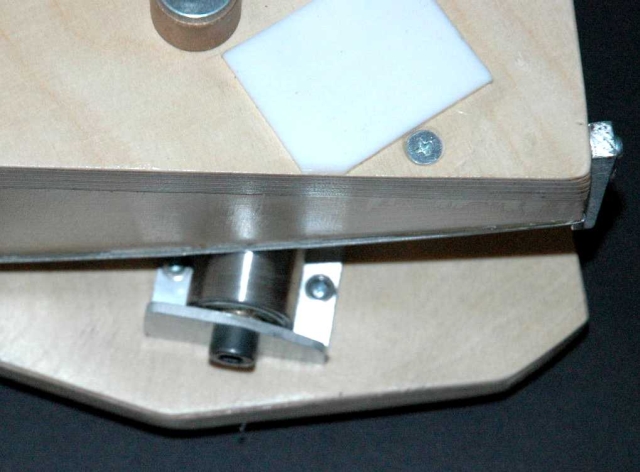
Die Nordsegmente machen auf den Stützrollen eine Abroll- und eine Schiebebewegung.

Darum müssen die Rollen breiter sein als handelsübliche Kugellager, diese hier sind aus 30er VA- Rohr gedreht und haben je zwei Kugellager.
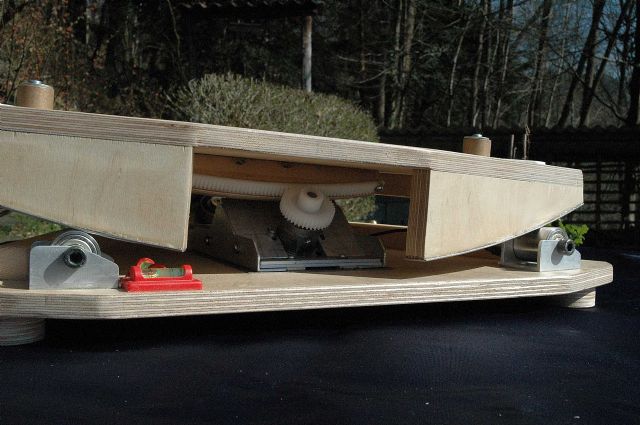
Zum Antrieb der Plattform habe ich ein Getriebe zuammengebastelt, das aus einem Planetengetriebe mit i = 1:20,25 (Ebay), einem Getriebemotor von Conrad mit i = 1:380 und einem Schneckenradsatz (ebenfalls Conrad) i = 1:40 besteht.

Auf der Abtriebswelle des Planetengetriebes sitzt ein 40zähniges Zahnrad Modul1, das sein Drehmoment auf das verzahnte Segment (Teilkreisdurchmesser ca. 800mm) an der Unterseite der Schwenkplatte überträgt.

Dieses Segment besteht aus einer Zahnstange Modul1 (Conrad) und ist auf dem gefrästen Bogensegment verklebt, die Schrauben waren nur zum fixieren bis der Kleber trocken ist.
Auf die Laufflächen der Segmente sind VA-Bleche mit 2K-Kleber aufgeklebt.
Um die Plattform nach dem Ende eines Schwenks wieder in die Ausgangsstellung bringen zu können, kann man das gesamte Getriebe in einer Führung aus Profilen, Teflon und EbonyStar (alles Reste vorangegangener Projekte) ein wenig nach vorne schieben, soweit das das Zahnrad frei wird.
Dazu schiebt man einfach den Hebel nach vorn, der ist auch bei aufgesetztem Oberteil gut zugänglich.
Läßt man ihn los, zieht die Feder das Zahnrad wieder in Eingriff.

Das Teleskop auf der Plattform. Die Bauhöhe der Plattform ist 130mm (mit 21mm Füßen), damit steht das Teleskop nun 65mm höher als mit der Standartbasis.
Beim „First Schwenk“ gestern Abend hat das soweit auch alles funktioniert. Das Spiel des Planetengetriebes muß ich noch irgendwie kompensieren, es ist zwar nicht viel, nervt aber. Da hab ich schon eine Idee, dazu mehr wenns fertig ist.
Außerdem müssen noch Endanschläge dran.
Der Antrieb über den Gleichstrommotor mit Drehzahlsteller reicht schon aus um bei 300facher Vergrößerung nachzuführen und das Objekt für visuelle Beobachtung im Feld zu halten.
Eine Schrittmotorsteuerung ist angedacht, als ausgeprägter Elektro-Legastheniker (alles was mehr als zwei Drähte hat macht mir Angst) werde ich da aber wohl die Hilfe eines Bekannten in Anspruch nehmen müssen.
Alles in allem bin ich aber erst mal mit dem Ergebniss zufrieden.