
... die scheint dem allegro a4989 eh recht aehnlich zu sein. Den verwend ich jetzt.
Lg
Wolfi

Offene Steuerung mit Encoder und Autoguider
- Birki
- Geschlossen
-
-
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote"><i>Original erstellt von: Birki</i>
<br />hi!
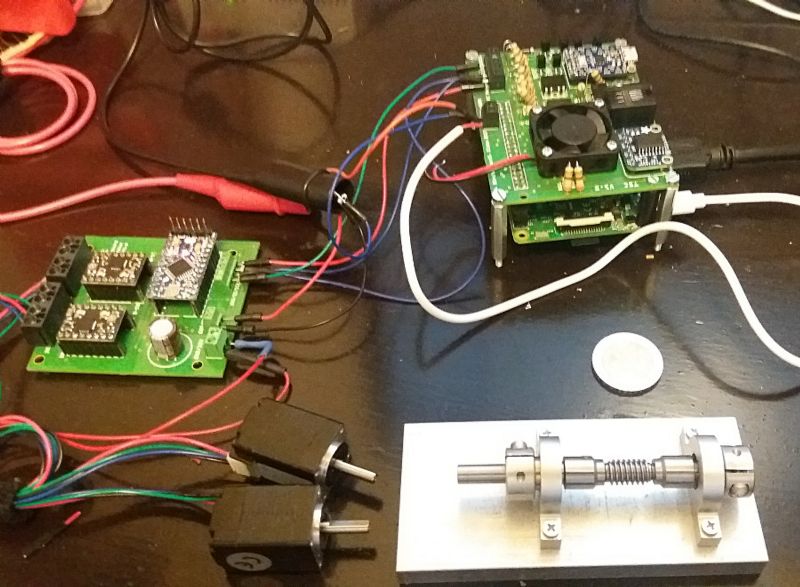
so - wieder ein bisserl weitergebastelt. weil mir die beschränkung auf die industrieboards etwas limitierend vorkam, habe ich mir auch ein kleines treiberboard mit 2 DRV 8825 und einenm arduino mini pro zusammengesteckt, dass vom raspberry via SPI gesteuert wird. idee hier war ersteinmal, auch zwei focusermotoren in der software zu inkludieren - für die montierung ist der mini doch ein wenig brustschwach.
<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">Hallo Wolfi,
erstmal herzlichen Glückwunsch für die bisher absolvierten Entwicklungschritte. Gerade den hier dokumentierten Schritt halte ich für sinnvoll.
Die Anregung kam ja primär auch aus dem schwarzen Forum
http://forum.astronomie.de/php…tellen_-_TSC_#Post1282023Und das war auch bisher meine Anmerkung, daß der erste Aufsatz sich erstml zu stark auf eine Treiber konzentriert. Klar man muß auch irgendwo mal anfangen. Und ich denke, Dein Projekt ist auf einem guten Weg.
Weiter so
Hast Du nicht mal darüber nachgedacht, die UI in eine Weboberfläche zu packen?
Auf dem Raspberry PI hast Du ja Ressourcen frei. Ein einfacher Webserver ist schnell installiert.
Dann könntest Du Remote vom PC aus oder mobile Device auf die UI zugreifen. -
hi!
die beschränkung auf die allegro endstufe ist sicher nicht in stein gemeisselt - ich sollte heute mal ein PCB für einen teensy und 4 DRVs kriegen, dann kann man mal weiterschauen. als egoist wollte ich halt zuerst einmal meine NEMA23 monster antreiben ohne dass alles abfackelt. weil die software eh getrennt ist vom treiber sollte auch die umstellung nicht so ein drama sein. allerdings tendiere ich auch beim teensy wieder dazu, USB zu verwenden statt SPI - die kommunikation ist doch ein bisserl einfacher.die UI in eine weboberfläche seh ich nicht als so vordringlich an, weil der raspberry ja sowieso einen VNC server hat, und mit dem kann ich mich tadellos mitm handy/tablet/laptop verbinden (der pi macht ja selber einen hotspot auf). hat sicher auch nachteile, aber das GUI ist mittlerweile gar nicht so unaufwändig.
lg
wolfi -
... und da sinds - 4 treiber und 1 teensy 3.6


lg
wolfi -
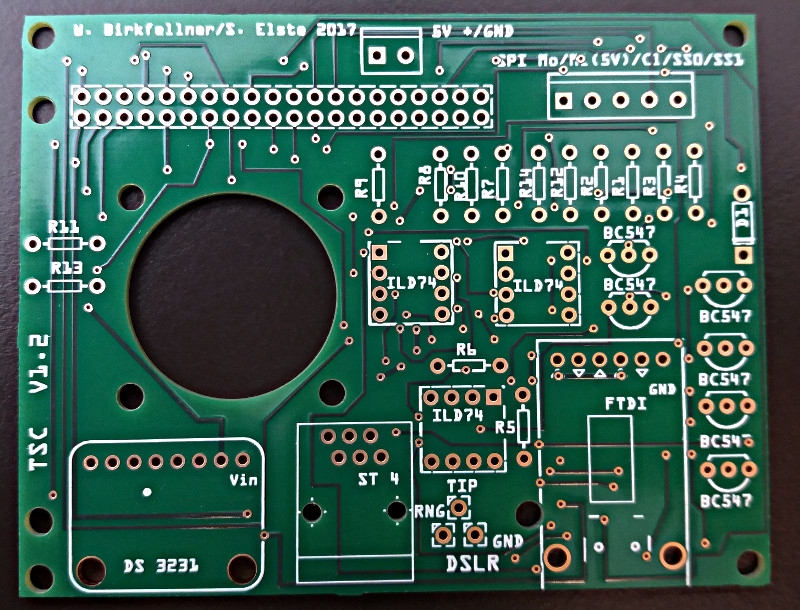
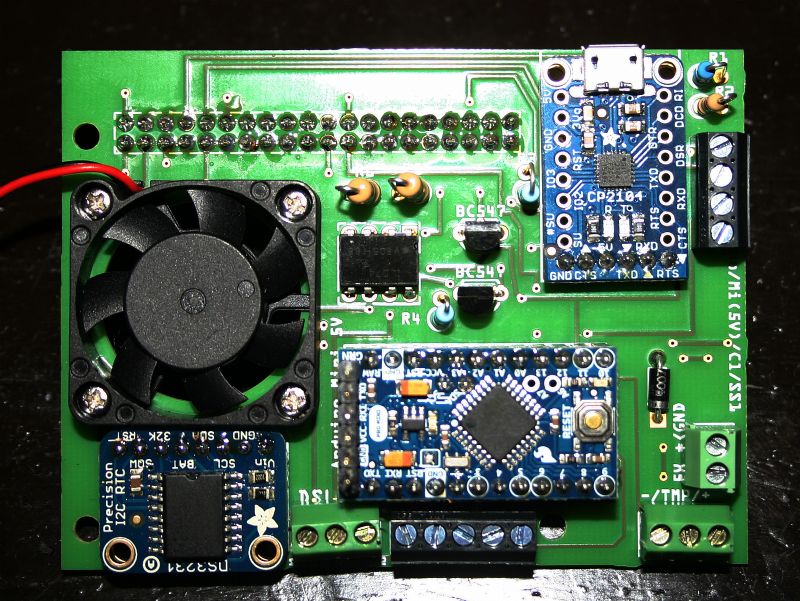
soooo ... und jetzt kommen lüfter, uhr, DSLR buchse, ST 4 (beide mit insgesamt 5 optokopplern getrennt) und der USB/RS232 wandler fürs LX200 auf das hat mit SPI ausgang, und dann schau ma amal
lg
wolfi -
Hallo Wolfi,
Mal eine Frage zur Motorsteuerung. Kann man damit auch Guiding (nicht Tracking) auf sich beliebig schnell in beiden Achsen bewegende Objekt machen? Z.B. ISS? Ich sehe hier einen Typ, der das für Meade LX200 AutoStar II gemacht hat:
http://www.optictracker.com/Home.htmlDie ISS wird mit einem kleinen Sucher mit USB Cmaera aufgenommen. Dann werden die Montierungsachsen mit beliebigen Geschwindigkeiten angesteuert damit die ISS exakt in der Bildmitte bleibt. Das die Montierung äquatoriell aufgestellt ist, ist dabei eigentlich Nebensache (evtl. sogar hinderlich). Im Mainscope kann mann dann mit hoher Vergößerung ISS aufnehmen.
Clear Skies,
Gert -
hi!
hmmm .... theoretisch ja, es gibt halt einen lag im guiding, und beliebig schnell sehe ich kritisch wegen der trägheit. ist jetzt aber auch nicht meine priorität, ehrlich gesagt
lg
wolfi -
hallo!
bitte - hier nun bitte der Pi, unter dem HAT mit Lüfter, echtzeituhr, optisch getrenntem ST4 eingang und getrenntem DSLR auslöser, USB input für LX200 und über SPI daranhängend das hilfsmotorenboard für die beiden focusermotoren (das ding davor gehört zu einem eigenbaumotorfokus). die focusermotoren werden mit ganz billigen A4988 oder DRV8825 bausteinen angetrieben, der controller ist ein arduino mini pro.
wer sich die schaltungen anschauen mag (kritik ist auch willkommen, ich bin der weltschlechteste elektroniker) - ist alles auf dem github-site
lg
wolfi -
Hallo Wolfi,
gefällt mir! Danke fürs zeigen!
-
hallo!
ok, das objekt is bekannt, das bild zeigt eine 10 min einzelaufnahme, keine darksm keine flats, kein stacking. das seeing war mässig, der mond ist auch grad aufgegangen. gemacht wurde es durch den 13" f/4 mit einer canon 1100 da, iso 200, 10 minuten lang. guiding mit einer zwo asi 120 mm durch ein 4" f/10 leitrohr (ein ordinärer FH).
autoguiding erfolgte durch die steuerung
... kein ST4, kein laptop. es gibt noch bugs, der RMS error war 1.3", da kann man noch was machen weil die korrektur in deklination beim backlash noch einen bug hat. autoguider entwickeln ist halt echt ned so einfach, am ende muss man am fernrohr debuggen ...lg
wolfi
-
hi!
heut hab ichs einmal gestackt - auch in der 3x10 min + dark erkennt man noch kleine guidingfehler, die mit einer fehlerhaften backlash-kalibration (alleinige schuld des programmierers) zusammenhängen. aber im grund bin ich nicht so unglücklich über den eigenbau... ist mein erstes astrofoto seit ~ 3-4 jahren, als der ST4 eingang an der L...ef..t verschieden ist ...
... und jetzt portier ich den ganzen kas einmal auf debian stretch und schau, wie gut INDI 1.6 funktioniert ...
lg
wolfi -
... und hoffentlich die letzte revision vom hat - st4 macht grössere probleme als gedacht, daher nun der mini pro als ADC, der die ST4-zustände auslies und über SPI dem pi mitteilt. dazugekommen ist ein temperaturfühler
Release, ich hör dich singen ...
lg
wolfi -
... so ... neue handbox mit focuser-fernsteuerung. allerdings frag ich mich grade, ob ich nicht das bluetooth zugunsten von wlan kübeln sollte. ist einfach stabiler. hat wer erfahrung mit den ESPs?

lg
wolfi -
Hi Wolfi,
Die Orion Ergebnisse sehen ausgezeichnet aus. Bringt die Software noch Plots mit für RA/DEC guiding Errors? So wie Phd-Guide? Ich habe nicht jeden Post gelesen, ist ein PEC in der Software vorgesehen?
Alles zusammen eine Super Sache und ein sehr lobesnwerter Zug von Dir, die Daten offen zu publizieren.
Clear Skies,
Gert -
Hallo Birki
Bluetooth ist das wo Windows die funktionierenden Treiber durch microsofteigene fast Funktionslose ersetzt und dabei Bluetooth gleich deaktiviert und die Einstellbarkeit an gewohnter Stelle auch gerne mal verschwinden lässt.
Ich würde bei Wlan bleiben.Gruß Frank
-
hi!
(==>)gert: plots - naja, ich hab mit 800x480 nicht soviel platz, ich zeige derzeit den maximalen fehler an und rechne laufend den RMS fehler mit (der auch angezeigt wird). derzeit gibt es die option, ein CSV-log, das man in excel anschauen kann (wenn man mag) abzuspeichern. die daten sind also da, und das zu visualisieren ist kein problem. ich will halt auch das user interface irgendwie kompakt halten. kann man aber für die zukunft andenken. PEC ist derzeit nicht drin, ist aber machbar. ich denke nur, dass der Autoguider das eigentlich auch ganz gut kann, und ausserdme würde man dann doch einen rotationsencoder brauchen ...(==>)frank: naja, von programmiererseite hat man da etwas mehr freiheit. allerdings ist bluetooth etwas, was wir schon lang verdrängt haben. ich hab mir fast ein bisserl in die hose gemacht, als ich gesehen habe, wie ein bluetooth modul programmiert wird - nämlich mit hayes AT commands, wie ein modem (das hatte ich schon lang vergessen, uiuiui ...).
im grunde genommen ist BT eine ganz normale terminal kommunikation, wie anno damals mit dem nullmodemkabel. das lässt sich alles machen, und ich habe mich dabei fast wieder ganz jung gefühlt :D, aber es hat nachteile:
- es gibt kein internes handling, wenn die verbindung abreisst ... das muss die software machen, also port schliessen, schauen, ob das modul da ist, dann port wieder aufmachen etc. pp.
- es ist langsam
- das konfigurieren von dem HC05 modul ist gar nicht sooo trivial, weil man ersteinmal die MAC adresse auslesen mussundsoweiterundsofort
aus dem grund habe ich auch die LX200 kommunikation auf USB umgebaut. natürlich kriege ich noch terminalzeilen mit den LX commands, aber der konverter ist am raspberry und ich weiss wenigstens, was der macht. und wer hat noch einen PC mit RS232 schnittstelle?
auf der anderen seite macht der pi ja ein lokales wlan auf, und das geht sehr gut (ich verwend nur mehr sky safari am tablet mit wlan und hab gar keinen laptop mehr in der sternwarte). und nette mikrocontroller mit wlan gibts ja auch (ESP Wroom, adafruit huzzah etc.). das wäre eigentlich keine affäre. das einzige, was mich etwas hemmt ist der umstand, dass die handbox dann ein display braucht, weil man evtl. eine TCP/IP adresse auswählen können muss. bluetooth ist halt leicht, wenns einmal konfiguriert ist ...
lg
wolfi -
Hallo Wolfi,
wenn Du statt einen HC05 einen ESP8266 ESP-01 nimmst. Darauf ESP-LINK installierst, dann kannst Du auf Bluetooth verzichten.
Um ESP-Link zu konfigurieren, kannst Du vom PI oder Deinem Tablet aus eine AP-Verbindung aufmachen (Soft-AP).
Damit könntest Du Deinen Handcontroller dann Konfigurieren (Spezielle Webpages gibts dafür auf ESP-LINK).
Bluetooth wäre Geschichte, wenn Du ESP-LINK Deinen Raspberry PI als AP point nennst.
Probiers mal aus. Die Programmierung der ESP-01 ist in etwa ähnlich gewöhnungbedürftig, wie die der HC05.
Vielleicht mach ich Dir mal ne kleine Anleitung hier hin.Weiter gedacht kann man einen möglichen Arduino auf dem Hand-Controller komplett durch einen höherwertigen ESP-8266 oder vielleicht einen ESP32 ersetzen. Die Programmierung kannst Du ebenso in ArduinoStudio machen.
Hier mal ein Beispielangebot:
https://www.ebay.de/itm/ESP32-…m:mUL4FBrgCcKQv0toMU96PfgFür den stationären Betrieb kann ich mir nichts besseres vorstellen. Bluetooth auf Windows ist nicht gerade ergonomisch.
-
servas!
ja, ich habe hier eh einen node mcu esp 32 und ein 1.3" oled herumliegen. der gedanke wäre, sich gleich als client an den lokalen access-point vom pi zu hängen, wie ich das ja für VNC und sky safari oder CdC eh schon mache.
nachdem die funktionalität in der software bis auf ein paar mini-dinger seit gestern (also eigentlich heut in der früh) fertig ist, zögere ich noch ein wenig, eine neue baustelle aufzumachen. aber auf der anderen seite sehe ich beim bluetooth wenig zukunft. wenns geht, ist es eh gut, aber wenn man mal die verbindung verliert ist der weideraufbau eher ein glücksspiel. und bei tcp/ip hab ich den ganzen dreck nicht.wg. wlan am microcontroller ich habe mich bisher allerdings nur ein wenig mit dem adafruit huzzah 8266 beschäftigt, der ist nett, hat aber zuwenig GPIos für 10 schalter (richtung, geschwindigkeit und 2 focuser), vor allem, wenn ich den I2C fürs oled brauch. wegen der konfiguration würde ich da einfach auf die ethernet libraries oder ähnliches zugreifen (hab mich aber noch nicht damit beschäftigt).
derzeit werkelt ein 8MHz 3.3V arduino mini pro in der handbox. was halt auch relevant ist, wieviel strom ich für die kombi wlan/oled brauch. schon jetzt bracuhen die 3 AA batterien in dem gehäuse den meisten platz.
lg
wolfi -
Hallo Wolfi,
genau wegen dem Arduino mini hab ich Dir den ESP-01 empfohlen. Den schließt Du an TXD RXD an und fertig. Der ESP-01 braucht auch 3.3V.
Das ist bestimmt das schnellste. Ohne das Du was änderst. Halt nur ein "Goldblatt" an Deiner Baustelle. Mehr nicht. Probiers aus. Die Dinger kosten weniger als ein HC05. Wennst magst, schick ich Dir einen fertig "geflashten" zu. Ich hab noch 5 von den kleinen, die reichen. Und 5 von den großen für die Onstep. -> PN -
servus!
danke fürs angebot, ich schaus mir an und komm drauf zurück. der aufwand is sowieso da, ich muss ja das pcb neu machen ...
der ES 01 hat aber nur 9 I/O pins, oder? wie gesagt, wenn ich a display möcht, brauch ich doch eher 12 ... für die schalter und das i2c ...lg
wolfi -
Holla, ja wenn Du es eh neu machst, dann nagle gleich ohne Köppfchen.
Also dann wrüde ich nen großen ESP nehmen und basta. Probiere, ob sich der Code vom Arduino Mickrig verwenden läßt. Oftmals spielen nur Timer-Sachen verrückt Den Rest des Codes kannst vielleichtn noch verwenden. -
hi!
also, die NodeMCU ESP32 ist schon a bisserl was anderes als die 8266 teile. mit dem OLED redet er schon, jetz mach ma einmal ein tcp/ip klienterl, und dann sch..ss ma auf das bluetooth glumpadalles über autonomes sternwarten-wlan gfallt ma immer besser ...
lg
wolfi -
ok, des war leicht
-
hallo!
so ... skynet up and running. Der Raspberry macht einen Hotspot auf, ein Adafruit Feather ES 32 verbindet sich drauf und schon plaudern die 2 ganz zwanglos miteinander. MIt dem Display bin ich mir noch nicht sicher, das ist ein NoName OLED ... mal sehen.Externer Inhalt www.youtube.comInhalte von externen Seiten werden ohne Ihre Zustimmung nicht automatisch geladen und angezeigt.Durch die Aktivierung der externen Inhalte erklären Sie sich damit einverstanden, dass personenbezogene Daten an Drittplattformen übermittelt werden. Mehr Informationen dazu haben wir in unserer Datenschutzerklärung zur Verfügung gestellt.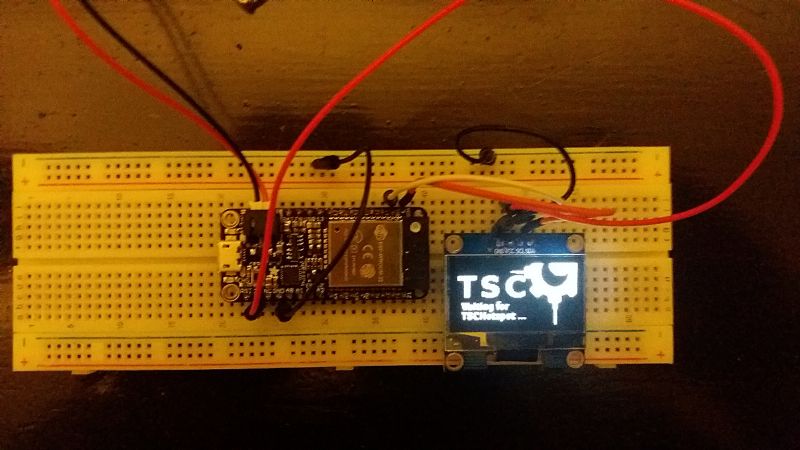
lg
wolfi -
Hey Wolfi,
der ESP32 ist echt cool. Habe mir vor einigen Wochen auch einen geholt um mein Terrarium zu automatisieren (Licht, Temperatur, Beregnungsanlage usw.). Inklusive Weboberfläche mit Temperaturgraphen usw. macht das Ding ganz locker flockig mit [:)]
Grüße,
Marcus
Jetzt mitmachen!
Sie haben noch kein Benutzerkonto auf unserer Seite? Registrieren Sie sich kostenlos und nehmen Sie an unserer Community teil!
