Hallo Lothar,
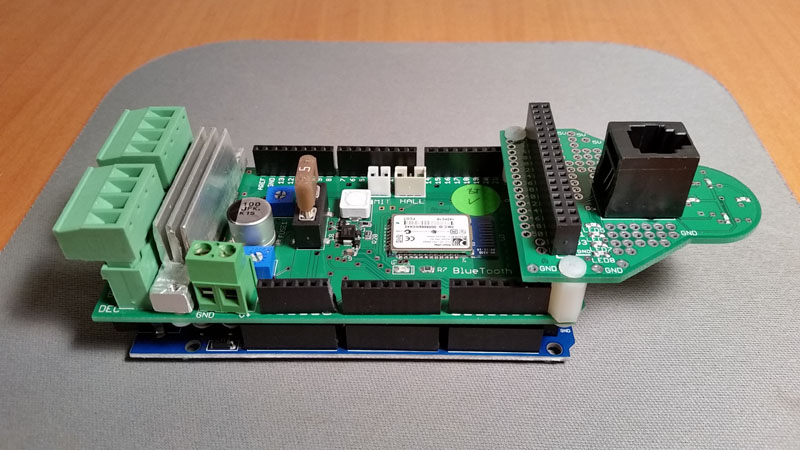
habt ihr auch den Spannungsteiler oder einen Levelshifter an RX, TX angehangen? Der Atmega läuft bei 5VTTL, der HC05 für RX,TX bei 3VTTL. Die HC05/06 sind 5VTTL tolerant, wenn es um deren Betrieb über VCC geht.
Manche HC05 haben den Spannungsteiler direkt auf der Platine, aber nicht alle.
Also, auch dies mal prüfen.
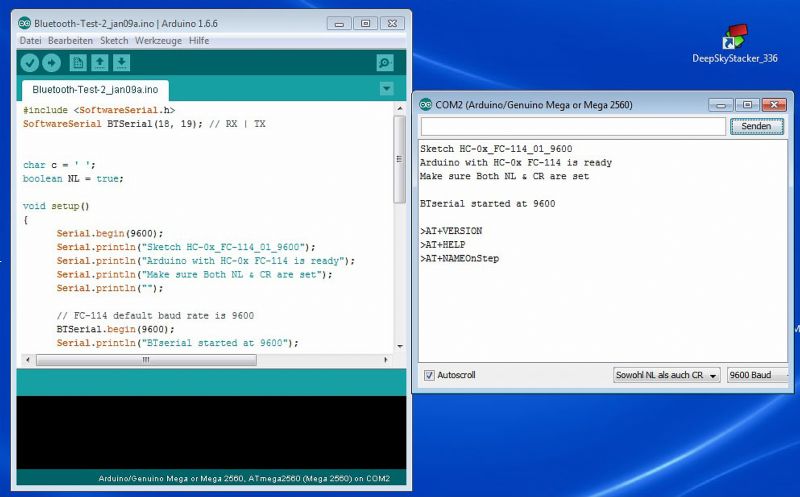
Dann müßte ich noch ein Testprogramm haben, das die Kommunikation zwischen Bluetooth und dem PC testest. Da wird ein Loopback zwischen der USB und dem Bluetooth-Dongle gemacht.
Damit kann man die Konfiguration des BT-Sticks einfacher testen.
LG
Gerrit