
Hallo Werner,
ich Benutze die automatische Umschaltung zwischen mikro und Vollschritt Betrieb in dem ich das Register "FS_SPD" setze.
Wie hast du es probiert?
Über "STEP_SEL" wird der Zähler reseted.
Grüße
Igor
Hallo Werner,
ich Benutze die automatische Umschaltung zwischen mikro und Vollschritt Betrieb in dem ich das Register "FS_SPD" setze.
Wie hast du es probiert?
Über "STEP_SEL" wird der Zähler reseted.
Grüße
Igor
Hallo Igor,
Zu "Ich dachte ich könnte so ein rumliegende SP Okular als Teilespender benutzen, nur wie?"
Da ich vermute, dass du den Polarstern einigermaßen gut findest, würde ich eher vorschlagen, etwas mit einer längeren Brennweite zu nehmen (vielleicht Zoom). In der Bucht finden sich immer sehr günstig irgendwelche Objektive von alten analogen Fotoapparaten.
Umso genauer kannst du den Himmelspol anvisieren.
Grüße
Sandor
(==>)sandor
ok, danke für dein Tipp.
(==>) alle
Soeben wollte ich ein oder anderer Strichbild mit eos auf meine neue Montierung machen.
Leider sobald ich draußen in Position war, waren die wenige Sterne wieder weg ![]()
Alles was ich habe ist ein Bild. Montierung zwischen Nord und Ost statt Nord gedreht, um Stern zu laufen zu bewegen.
Newton 900mm Brennweite f6, mit Canon 450D, 5 Minuten lang, entspricht eine halbe Umdrehung der Eingangswelle.
Der aufgenommener Stern lag bei +19 grad in DEC.
Die Bedingungen , miserabel.
Mir sagt das Bild leider nichts ![]()
Wie muss ich aufstellen um Fehler besser zu sehen ?
http://www.bilder-hochladen.net/files/big/fjy9-69-c0e1.jpg
Naja dann werde ich noch warten müssen...
Grüße
Igor
Hallo Igor,
zu "Mir sagt das Bild leider nichts ![]()
Wie muss ich aufstellen um Fehler besser zu sehen ?"
Ich habe mir mal das Bild etwas angesehen: Wenn deine Eingangswelle eine halbe Umdrehung in der Zeit gemacht hat, hat sie bei der 1:160 Untersetzung 80 Zähne abgearbeitet. Ich habe mir mal einen Bildausschnitt angesehen:
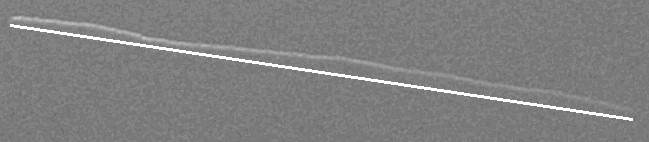
Dies sind ca. 620Pixel. Demnach hat jeder Zahn vom Getriebe ca. 7,75Pixel lang belichtet. Da müsste die Übersetzung und Präzision vom Getriebe verdammt gut sein, um dies perfekt wiederzugeben.
Leider bin ich mit meinem Projekt noch nicht soweit, um sagen zu können, ob die von dir ermittelten Schwankungen normal sind oder nicht.
Ich habe mal in dein Bild eine Gerade vom Anfang zum Ende reingelegt.
Normalerweise sollte die Bahn (idealerweise) eigentlich ein Kreisbogen, oder bei einer so kurzen Belichtungszeit, eher fast eine Gerade sein.
Deine Kurve ist weder eine Gerade noch ein Kreisbogen.
Bei längeren Belichtungszeiten wird so ein Stern bei korrekter Ausrichtung UND korrekter Nachführgeschwindigkeit bei so einer Kurve im Wesentlichen als ein heller Punkt mit einer leichten Verschmierung in Längsrichtung dargestellt (wenn die Ausrichtung auf den Himmelspol stimmt und die Drehgeschwindigkeit 100% genau ist, wird ein perfekter Punkt abgebildet (Logisch, so soll es ja werden [:)])
Wenn die Ausrichtung auf den Himmelspol sehr gut ist, deine Nachführung aber aufgrund von Ungenauigkeiten im Getriebe aber mal einen Hauch zu langsam, dann aber mal einen Hauch zu schnell läuft (im Mittel sollte sie natürlich genau 1 Umdrehung in 23h 56min 4sec machen), dann erhältst du einen immer noch relativ guten zentralen Fleck, der aber aufgrund der Geschwindigkeitsschwankungen leicht mit der der Drehrichtung einige Pixel in Längsrichtung verzerrt wird.
Je länger du aber belichtest, desto schwächer wird dies zu sehen sein, da aufgrund der Schwankungen die Position um die Mitte schwankt.
(Ist nicht immer leicht, die Gedanken in korrekte, allgemeinverständliche Worte zu fassen [:D])
Wenn die Ausrichtung auf den Himmelspol stimmt, solltest du meiner Meinung nach erstmal zuversichtlich an die ersten richtigen Aufnahmen rangehen.
Zur "Fehlersuche"
Du solltest mal nacheinander versuchen zu ermitteln, ob der Fehler von der Steuerung mit den Mikroschritten oder aus dem Getriebe kommt.
Kannst du mal deine Steuerung gegen eine ganz simple Mikroschrittsteuerung mit einer Quarzgenauen Ansteuerung testweise austauschen? Dann könntest du zumindest die Steuerung als Verursacher ausschließen.
Nach deiner Erfahrung werde ich meine Steuerung vor dem Zusammenbau mal dahingehend testen, wie genau die Schrittmotoren die Steuerpulse in Drehbewegungen umsetzen. Wird zwar recht aufwendig, erspart mir hoffentlich aber später eine Nervenaufreibende Fehlersuche.
Unabhängig davon plane ich auf jeden Fall eine aktive Nachführung mit einem Leitstern zu implementieren. Kostet einmal Zeit bei der Entwicklung, erspart mir aber hoffentlich später viele Enttäuschungen.
Aufgrund der relativ wenigen Zähne, die ein Getriebe während einer relativ kurzen Belichtungszeit durchläuft, wist du wahrscheinlich kein Getriebe auf der Welt finden, das perfekt passt du einen Stern perfekt als Punkt abbildet.
Da kommst du um eine aktive Nachführung, die Getriebeschwankungen ausgleicht, vermutlich nicht herum.
Ich bin aber sicher, dass du mit Harmonic-Drive sehr gute Voraussetzungen hast, tolle Aufnahmen zu machen (erstmal auch ohne aktive Nachführung).
Und da deine Konstruktion ja sowieso recht pragmatisch ist, würde ich mal direkt versuchen, einige richtige Aufnahmen zu machen.
Man findet im Netz die tollsten Fehlerkurven. Die Frage sollte aber sein: sind die überhaupt in der Praxis so sehr von Bedeutung oder doch eher Akademisch?
Es gibt in allen Bereichen die Pixel-Peeper, die einzelne Bildausschnitte bei 5000% am Monitor betrachten und dann feststellen, dass ein Pixel nicht perfekt passt [:)].
Ich bin mir nicht sicher, ob man solche Leute immer ernst nehmen oder sie doch eher bedauern sollte.
Wo bleibt der Spaß-Faktor? Wenn ich perfekte Bilder haben will, Googel ich nach Hubbel.
Grüße
Sandor
Hallo
ob das nun eine Gerade ist oder ein Bogen, oder eine Schlangenlinie ist nicht so wichtig.
Interessant sind nur die ganz kurzen Ausschläge, die schafft man nicht mehr zu guiden wenn sie zu schnell sind, 1 Pixel Ausschlag in der Sekunde dürfte die Obergrenze des Zumutbaren sein.
Es scheinen solch kurze Fehler vorhanden zu sein. Am Ende deiner Strichspur ist ein kleiner eckiger Ausschlag, der Stern wandert ja ca. 0,5 Pixel in der Sekunde und der Hacken dort geht inerhalb der Line in 3 Pixeln also 6s 1Pixel von der Ideallinie weg. Das kannst du jetzt auch in Bogensekunden umrechnen, das wären für deine Kamera und das verwendete Teleskop 1,2" Ausschlag in 6s, also 0,2"/s, das sollte bei den Üblichen Guidezeiten von 1-2s gut korrigierbar sein.
Ich denke da kannst du schon etwas Stolz drauf sein.
Der Haken kann auch Seeing aufgrund der schlechten Bedingungen sein.
Gruß Frank
(==>)sandor
(==>)frank
Mensch, vielen Dank für die wirklig gute Erklärungen.
Ich habe heute Abend weitere Spuren gemacht und etwas schlauer geworden.
Erstmals habe ich 2 Aufnahmen gemacht je 9 Minuten, dies entspricht eine Volle Umdrehung der Eingangswelle von Harmonic drive.
Und sehe da, die Kurven sind so gut wie identisch!
Also periodisch.
Aber bei Harmonic drive ist dies nicht normal.
Also Messuhr geholt und festgestellt, dass meine Wellenverlengerung keine perfekte Rundlauf hat. Dies muss ich wohl nochmal machen und diesmal lass ich es drehen.
Erklärt aber an eine Stelle Linienänderung.
Dass ist eigentlich gute Neuigkeit ![]()
Hier sind die 2 Bilder, wie gesagt je eine Umdrehung ein hinter andern aufgenommen.
http://www.bilder-hochladen.net/files/big/fjy9-6a-ec8c.jpg
http://www.bilder-hochladen.net/files/big/fjy9-6b-060a.jpg
Dann habe ich noch folgendes ausgerechnet.
Wenn ich ein gerade Strich mittig zu meine Strichaufnahme mache, der genau so dick ist wie Aufnahmestrich und am meist entfernten ecken die Pixel zähle, komme ich auf ein Fehler von 9 Pixel.
Auflösung (Bogensekunden/Pixel) = 206 * Pixelgröße (µm) / Brennweite (mm)
In meinen Fall: 206 * 5,2 / 900 = 1,2 Bogensekunde pro Pixel
1,2 * 9 Pixel = 10,8 Bogensekunden
Wenn ich jetzt die 9 Pixel nicht rechne (diese kommen wahrscheinlich von ungenauem Rundlauf) dann kann ich 6 Pixel nachzählen als schlechtester Wert und diese würden dann ca. 7 Bogensekunden bedeuten.
Falls meine Berechnung richtig ist bin ich Top zufrieden.
Wenn ich meine Kurve mit der Kurve von Godzilla Montierung vergleiche, sind es zwei verschiedene Paar Schuhe.
Hier nochmal Link zu Godzilla Kurve: http://www.sternenfreund.de/Zu…Montierung/Fehler0002.jpg
Und weil es so schön mit dem Kurven ist lege ich noch eine von heute Abend dazu ![]()
http://www.bilder-hochladen.net/files/big/fjy9-6c-bcbe.jpg
Viele Grüße
Igor
Hallo Igor,
lese gerade wieder mal mit....
Meine Meinung:
Kamera drauf, Autoguider angeschlossen und versucht, mal 5 bzw. 10 Minuten zu guiden. Wenn es Dir gelingt, ist Dein Projekt gelungen (Sternscheiben kreisrund), wenn nicht, ist die Übersetzung zu gering und der harmonische Fehler macht sich zu sehr bemerkbar.
Fehlerkurven und zu viel Theorie ersetzen nicht den praktischen Test, denn nur dieser ist maßgebend. Wenn Dein System vom Autoguider korrigiert werden kann, spielen alle anderen Kurven und Meßwerte keine Rolle. Am Ende ist die kreisrunde Sternscheibe bei 1000 - 2000 mm Brennweite und 600s Einzelbelichtung das Maß der Dinge, sonst Nichts. Und genau dort bin ich damals gescheitert, trotz erheblich größerer Übersetzung. Da half mir nur noch der Getriebeaustausch, was bei Dir nicht "mal schnell und bezahlbar" möglich ist, aber warten wir mal ab, vielleicht geht es ja.
Außerdem:
Der Fehler war bei mir auch abhängig vom Teleskopgleichgewicht und der Belastung des Getriebes insgesamt. Je geringer die Belastung, desto kleiner der Übertragungsfehler. Dann musst Du den richtigen Guide-Intervall mit passender Integrationszeit der Guidekamera ermitteln, so einfach ist es nicht, da gehen schon einige Abende ins Land.
Getriebefehler in Deklination machen sich nicht weniger dramatisch bemerkbar, als in Rektastension. Erst schein Alles prima zu laufen und hupps, ist der Stern in DEC weggehüpft.
Gruß und cs,
René
Hallo Igor,
wie schon gestern geschrieben und von vielen Seiten bestätigt: du hast ein tolles Teil gebaut.
Nur eines gefällt mir (noch) nicht: Das Stativ passt überhaupt nicht zu der Nachführung[:D]. Ist wie ein Porschemotor in einem Fiat 500[:D]
Deine Mechanik ist toll, wenn es draußen aber zu windig ist, kann der Wind dir ebenfalls einen Strich durch deine Rechnung machen.
Soweit ich mich erinnere, hast du ja selber getestet, das du die Harmonic-Drive mit Gewalt aus der Position drücken kannst, anschließend (ohne externe Belastung) gehen die Getriebe wieder quasi Spielfrei wieder in die Ausgangsposition zurück.
Soweit ich mich erinnere, hatte der Sternenfreund ein gebrauchtes Getriebe, dessen Vorgeschichte unbekannt war. Für Astro eigentlich zum Scheitern verurteilt.
Ich verwende sowohl auf der Arbeit wie auch bei meinem Projekt nur neue Getriebe. Da sind die Erfolgsaussichten wesentlich höher.
Deine Kurven sind Toll, die Sprünge könnten z.B. auf Windböen oder sonstige Fremdeinwirkungen zurückzuführen sein, da würde ich mir derzeit noch keinen Kopf zerbrechen.
Bis auf den nicht perfekten Verlauf sind die wirklich gut. Und wenn man die kleinen Sprünge/Ausreißer mal ignoriert, wird man so einen schönen Verlauf mit anderen Getrieben ohne aktive Nachführung vermutlich nicht so ohne weiteres hinbekommen.
Meine "große" Nachführung muss ich aus Zeitgründen erstmal zurückstecken. Ich habe zum Glück 3 kleinere neue Harmonic-Drive (komplett fertig im Gehäuse, Typ UNIT mit Hohlwelle), so dass ich im Moment plane, 2 HD hintereinander zu montieren und mir daraus eine mobile Plattform aufzubauen (bin notgedrungen beruflich viel unterwegs, und schöne Sternenhimmel gibt's nicht nur am Wochenende zu Hause)). Die HD haben beide 1:50, macht also zusammen 1:2500! Mit 400-er Schrittmotoren sind das 1.000.000 Vollschritte pro Umdrehung. Und obwohl die Getriebe neu sind erwarte ich nicht, ohne Nachführung bei solchen Strichaufnahmen eine perfekte gerade zu bekommen, so realistisch bin ich da schon.
(Hintergrund: im stationären Betrieb zum Positionieren sind Mikroschritte toll, ich jage solange Mikroschritte raus, bis die Position passt. Aber im dynamischen Betrieb sind die Mikroschritte zur Positionierung einfach ungeeignet, egal wie viele Mikroschritte man verwendet. Nur schön sauber und ruhig laufen die Motoren dadurch.) Ich habe mittlerweile gut ein halbes Dutzend Nachführungen gebaut, mit und ohne HD, da lernt man auch aus den eigenen, nicht so perfekten Ergebnissen (Fehler waren es ja nicht, Fehler wären es nur, wenn man nichts daraus lernt[;)])
Hinzu kommt, dass alle mir bekannten Schrittmotoren nur eine Genauigkeit von 5% haben (von Vollschritt zu Vollschritt).
Daher auch meine Planung, zunächst eine Quarzsteuerung aufzubauen und die Elektronik später um eine selbstgebaute aktive Nachführung zu ergänzen.
Bin mal auf deine ersten richtigen Aufnahmen gespannt, auf meine eigenen muss ich leider noch warten [:(!].
Viel Glück mit der neuen Welle (die Linie sollte dadurch besser werden, ich befürchte aber, dass auch sie nicht perfekt wird. Ich habe bisher hier im Hobby-Bereich ohne eine Nachführung auch noch keine perfekte Kurve gesehen)
Und falls das doch jemand hingekriegt hat, würde es mich wirklich interessieren, wie die Mechanik da aussieht.
Und zu deinen 9 Pixel: ausgedruckt entspricht 1 Pixel gerade mal 0,0847mm auf dem Papier. Also: ich schaue mir die Bilder nicht mit der Lupe an. Und im Bild sind es keine Sprünge, sondern leichte Unschärfen vom Mittelpunkt aus. Lege mal eine Gerad über deine Kurve, und schau dir an, wie viele Pixel fast perfekt liegen und wie viele "weit" entfern liegen. Diese "weit" entfernten verursachen ein etwas verschwommenen Eindruck. Das Bild ist nicht perfekt, aber mit Sicherheit gut brauchbar.
Und wenn du (wie üblich) mehrere Bilder Überlagerst, mittelt sich das Ganze nochmal heraus.
Mach weiter so.
Schöne Grüße
Sandor
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote"><i>Original erstellt von: Polarsternsucher</i>
Soweit ich mich erinnere, hast du ja selber getestet, das du die Harmonic-Drive mit Gewalt aus der Position drücken kannst, anschließend (ohne externe Belastung) gehen die Getriebe wieder quasi Spielfrei wieder in die Ausgangsposition zurück.
Soweit ich mich erinnere, hatte der Sternenfreund ein gebrauchtes Getriebe, dessen Vorgeschichte unbekannt war. Für Astro eigentlich zum Scheitern verurteilt.
<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
Ich kann die Harmonic drives nicht bewegen. Die Aussage die du meinst hat der jeniger mit der Godzilla Montierung gemacht.
Die Harmonic Drives sind ca. 3 Jahre alt und waren in einen Prototyp Roboter eine große Firma eingebaut.
Das Stativ ist von meine Astro-5 und nur um zu testen gedacht.
Das eigentliche Stativ muss ich noch bauen ![]()
Bitte nicht falsch verstehen, ich bin ja auch superzufrieden mit der Montierung, und mit Strichspuren kenne ich mich nicht aus, ich versuche nur Schritt für Schritt festzustellen, was ich überhaupt gebaut habe.
Diese kleine Ausreißer der sich immer wieder einmal pro Umdrehung wiederholt hat nur meine Vermutung bestätigt, dass meine Verlängerung der Eingangswelle nicht perfekt gemacht ist.
Diese habe ich vom Schrotthändler für 1 € gekauft und passend mit meine 150€ Standbohrmaschine gebohrt und auf eigentliche Welle angeschraubt.
Diese ist genauso provisorisch wie mein Stativ.
Wenn ich bei 1200 x siderisch drehe, dann höre ich dass an eine Stelle nicht der perfekte Rundlauf entstanden ist.
Nun dies hat mich nicht so gestört, erst gestern wo ich die Spur gesehen habe hat es sofort bei mir geklingelt.
Deswegen habe ich es gemessen und ca. 0,4 mm Abweichung festgestellt.
Da an diesen Teil meine Zahnriemenscheibe sitzt, schwankt die Spankraft des Riemens natürlich und ist auch für Riemen auf Dauer nicht gut.
Was meine Steuerung angeht, habe ich eine Arduino Platine (Quarz 16MHz) und l6470 Treiber.
Die Programmierung mache ich selber und bin zurzeit dabei den lx200 zu implementieren.
Deine “ komplett fertig im Gehäuse, Typ UNIT mit Hohlwelle“ riechen nach meine Teile :-D, sind ebenso Units mit Hohlwelle.
Dar bin ich echt gespannt wie es bei dir läuft. Die Idee mit 2 hintereinander finde ich super.
Und vielen Dank für deine ehrliche Meinung und Tips!
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote"><i>Original erstellt von: astromaster</i>
Kamera drauf, Autoguider angeschlossen und versucht, mal 5 bzw. 10 Minuten zu guiden. Wenn es Dir gelingt, ist Dein Projekt gelungen (Sternscheiben kreisrund), wenn nicht, ist die Übersetzung zu gering und der harmonische Fehler macht sich zu sehr bemerkbar.
<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
Hallo René
Schön wäre es ![]()
Aber ich brauche noch einen oder anderen Tag um die Steuerung zu programmieren so dass sie auch Nachführung macht.
Deswegen die Strichspuren so dass ich sehen kann wo ich überhaupt liege.
Die Tests sind ohne Gegengewichte und mit schlechten seeing entstanden.
Damit möchte ich auch prüfen, ob es bei genau diesen selbsthemmenden Harmonic drives, auch unbalanciert geht.
Das beste Beispiel dafür ist die Chronos Montierung.
Und du liegst genau richtig, ich brauche auch keine Strichspüren sondern runde scharfe Sterne ![]()
Vielen Dank auch für deine ehrliche Meinung.
Grüße
Igor
Hallo Igor,
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote">ich Benutze die automatische Umschaltung zwischen mikro und Vollschritt Betrieb in dem ich das Register "FS_SPD" setze.
Wie hast du es probiert?
Über "STEP_SEL" wird der Zähler reseted.<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
ich habe es genau wie du mit der automatischen Umschaltung über die in FS_SPD definierte Schwelle versucht. Ich nehme an, dass du mit STEP_SEL das Register STEP_MODE meinst?
Ich habe mit Reset_Pos den Schrittzähler zurückgesetzt, über STEP_MODE den "Schritt Modus" ausgewählt und mit FS_SPD die Schaltschwelle zum Vollschrit definiert. Das hat auch problemlos funktioniert! Allerdings hat nach der Automatischen Umschaltung der Positions Zeiger in ABS_POS nicht gestimmt. Das ist schon eine Weile her als ich damit gearbeitet habe. Ich weiß nicht mehr sicher, ob der Versatz immer gleich war oder jedesmal anders. Ich habe mir so beholfen, dass ich "bei meiner Anwendung" den StepMode nicht ändere. Dann läuft alles perfekt. Du hast bei deiner Anwendung aber weitaus längere Wege als ich, bei dir macht die Umschaltung zum Vollschritt mehr sinn!
Im Datenblatt steht auch
<hr noshade size="1">Warning: Every time STEP_SEL is changed the value in ABS_POS
register looses meaning and should be reset.<hr noshade size="1">
Ich nehme an, dass sich das auf die manuelle Umschaltung bezieht, aber es ist nicht auszuschließen dass es beim automatischen umschalten genauso ist. Ich vermute aber, dass du dir deine Positionen selbst merken musst, und beim Wechsel des Stepmodes auch selbst umrechnen musst. Ich wäre aber schon interessiert, wenn du das zum laufen bekommst, wie du es gemacht hast.
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote"><i>Original erstellt von: astromaster</i>
<br />
Kamera drauf, Autoguider angeschlossen und versucht, mal 5 bzw. 10 Minuten zu guiden. Wenn es Dir gelingt, ist Dein Projekt gelungen (Sternscheiben kreisrund), wenn nicht, ist die Übersetzung zu gering und der harmonische Fehler macht sich zu sehr bemerkbar.
<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
Gestern hatte ich so 2 Stunden Zeit um weitere Tests zu machen.
Habe dann relativ unausgerichtet und mit 2700 mm Brennweite problemlos über 10 Minutten auf meine Hauptoptik guiden können.
Zwar, war der Guidemaster ständig am korigieren aber wie gesagt, nicht ausgerichtet und bei 2700 mm.
Guiding ist schon einsatzfähig.
Jetzt bleibt nur noch die Kamera an meine Leitrohr zu stecken und die Canon an Hauptrohr belichten lassen.
Grüße
Igor
Hallo Igor,
dann bist du ja fast am Ziel. Ich bin mal auf deine ersten Langzeitbelichtungen gespannt [:p].
Kann ja fast nichts mehr schief gehen [:)]
Ich drück dir die Daumen
Sandor
dann wird man vermutlich feststellen das es wohl doch nicht an der Montierung lag wenn man bei 2700mm Brennweite ohne OAG arbeitet ![]()
bleibt nur viel Glück zu wünschen
Gruß Frank
Soeben habe ich mein erster Test mit Canon gemacht.
Irgendwo gehalten.
Guidemaster als guider.
Newton 150/900mm mit Canon450d
Guiding mit 80/400 und DMK
Belichtungsdauer 407 Sekunden
http://www.bilder-hochladen.net/files/big/fjy9-6d-115f.jpg
Die Sterne sind rund.
Grüße
Igor
Hallo Igor,
Glückwunsch zu dem Teil- da hast du in sehr kurzer Zeit aus den beiden Harmonics eine Klasse Montierung gebaut, alle Achtung.
Bin mal gespannt, ob Nachbauten kommen, du hattest ja nicht das einzige Set genommen. [:)]
Gruß
Stefan
Hallo
zumindest in der Mitte runde Sterne, da zeigen sich jetzt Außen andere Baustellen
Gruß Frank
(==>)Stefan, Danke, bin echt froh das es funktioniert.
(==>)Frank
ja, Komakorektor wäre nicht schlecht, genauso wie Newton richtig zu justieren. Nun es sind die alle erste fotos die ich gemacht habe und es geht erstmal um die Montierung.
Es gibt noch jede Menge Baustellen an Montierung selbst.
Grüße
Igor
Hallo Igor,
Tolle Aufnahme (was immer das auch ist [:D])
zu: "Es gibt noch jede Menge Baustellen an Montierung selbst."
Dein Thema lautete ja: Montierungsbau etwas anders
Und das ist dir anscheinend zu 100% gelungen.
Das manche Leute an allem etwas auszusetzen haben und nie zufrieden sind ist ja leider schon der Normalfall.
Und das man jetzt die anderen Komponenten zu der tollen Mechanik anpassen muss versteht sich leider von selbst. So ein Projekt endet ja nicht mit der Fertigstellung einer Komponente (auch wenn die Montierung ein entscheidender Faktor ist)
Mach weiter so!
Grüße
Sandor
Hallo Igor,
habe gerade hier rumgestöbert und zufällig deinen Beitrag gesehen.
Da muß doch jetzt auch der Godzilla seinen Senf dazugeben...
Erst mal alle Achtung vor dem Fleiß und der Portion Wahnsinn die man für so ein Projekt benötigt wenn man andere Wege beschreitet.
Ideen gibt es sehr viele aber die realisierung steht auf einem anderen Blatt. Ich arbeite jetzt schon zwei Wochen jeden Abend bis zum Umfallen an einem Okularauszug der anderen Art und weiß so über die Problemchen zu berichten die währen der Fertigung auftauchen können. Da muss man manchmal eisenhart sein um nicht alles in die Ecke zu schmeissen...
Ich weiß nicht ob es hier jemand mitbekommen hat, aber im letzten Jahr war mein Getiebe mit 120kg Teleskopmasse belastet. Dazu kamen noch einmal 120 kg Gegengewichte da meine HD`s nicht selbsthemmend sind. Hier ein Bild davon:
http://www.sternenfreund.de/Ablage/NewMewl.jpg
Mittlerweile ist nur noch der 300Mewlon mit 130TOA drauf und ich habe Platz in der Hütte.
Seit einem halben Jahr habe ich den TDM Drive Master nachgerüstet den ich schon seit zwei Jahren im Regal hatte um den per. Fehler wegzubügeln. Mit dem Guiden verhält sich eine Harmonic Drive Montierung ganz anders als eine Schneckenradmontierung und du kannst niemanden um Rat fragen.. Ich bin mal auf die ersten Bilder mit langer belichtungszeit und Brenweite gespannt.
Seit etwa zwei Jahren habe ich eine vollkomen neuartige Reibradmontierung in der Konstruktion, und werde zur ATT 2014 mit einem Prototyp aufwarten. Reibrad deshalb da die HD units praktisch viel zu teuer sind, und es daher nie einen größeren Markt im Astrosektor geben wird. Ich hatte bei meinen Teilen Glück da alles mittels Simmeringen dicht und vor Korrossion geschützt ist. Solltest Du Fett in die Dinger eingebracht haben, so rate ich dir die ganze Montierung einmal in die Tiefkühltruhe zu legen, und dann den Kältest zu machen.
Grüße aus dem Westerwald Andreas
Hallo zusammen,
trotz nicht perfekten rundlauf in RA habe ich am Samstag die PE Messung vorgenommen.
Diese deckt sich mit dem was ich mit Strichspur gerechnet habe.

Ein PE von ca. +-8"
Grüße
Igor
Hallo Igor,
ich habe an meinem Projekt auch etwas weiter gearbeitet.
In der Bucht finden sich ab und zu 5-Phasen-Schrittmotoren mit Treiber.
Ich habe mir eines zugelegt. Fazit: Wenn die "Normalen" 2-Phasen Motoren einem Fiat500 entsprechen, dann gibt es noch die "Mittelklasse" mit 3-Phasen-Motoren.
Die 5-Pasen-Motoren sind aber der Rolls-Royce.
Testlauf siehe hier:
[
Zum Glück braucht man nur einen so hochwertigen Schrittmotor.
Mein Entschluss steht fest:
5-Phasen-Schrittmotoren mit 500 Vollschritten und 250 Mikroschritten. Dazu 2 Harmonic-Drive mit jeweils 1:50 hintereinander geschaltet.
Macht mal eben 500*250*50*50 = Astronomische 312.500.000 Mikroschritte für eine Umdrehung der Abtriebs-Welle [:p].
Kein Wahnsinn, der nicht zu Toppen ist. Overkill ist halt alles [:D].
Wenn du also mal einen "Upgrade" vorhast: besorge dir 5-Phasen-Schrittmotore. Der sanfte Rundlauf allein der Motorwelle fasziniert.
Dahinter noch die Harmonic-Drive, und man ist rundum zufrieden.
Alles andere liegt Lichtjahre dahinter.
Grüße
Sandor
<blockquote id="quote"><font size="1" face="Verdana, Arial, Helvetica" id="quote">Zitat:<hr height="1" noshade id="quote"><i>Original erstellt von: Godzilla1</i>
<br />Hallo Igor,
habe gerade hier rumgestöbert und zufällig deinen Beitrag gesehen.
Da muß doch jetzt auch der Godzilla seinen Senf dazugeben...<hr height="1" noshade id="quote"></blockquote id="quote"></font id="quote">
Hallo Andreas,
Mensch, ich habe dein Posting irgendwie nicht sofort registriert.
Es freut mich riesig dass du dich hier meldest!
Ich habe bisher nur ca. 10 Kg Gewicht ohne Gegengewichte probieren können, aber bald kriegt mein 10" Dobson Rohreschellen spendiert und dann werden es bis zu 20 Kg mit dem ich testen kann.
Ich habe aber Gewichtbezüglich keine Bedenken. Deine Godzila ist der beste Bespiel dafür.
Die Korrosion habe ich am Anfang schon angesprochen, meine Harmonic drives sind gedichtete Units, aber von draußen kommt etwas Flugrost wenn man es in feuchte Umgebung länger lässt.
Ich habe schon am Haarspray gedacht [:D]
Hersteller besagt die Schutzart IP 65.
Trotzdem muss ich schauen wie es bei Tau aussieht.
Was die Nachführung betrifft ist das Teil einfach super.
Es zeigt keine Schnelle Änderungen und ist sehr gleichmäsig.
Zurzeit habe ich 8" messen können, diese Woche lass ich mir aber ein Teil drehen so dass ich perfekten Rundlauf kriege.
Dann konnte es auch noch weniger als 8" sein.
Auch wenn es bei 8" bleibt, ist diese in Losmandy Kategorie und für mich vollig ausreichend.
Grüße
Igor
(==>) Sandor,
bevor ich mich für ein "normales" Schrittmotor entschieden habe, habe ich mehrere Tests gemacht.
Eins davon war der Lasertest.
Ich habe mir ein Laser auf die Motorwelle geschnallt und auf 10 Meter den Lauf beobachtet.
Mit 200 Motorschritte und 128 Mikroschritte könnte ich keine Steps mehr erkennen. Die Bewegung war bei 10 Meter flüssig.
Aber nicht perfekt gleichmäßig!
Deswegen kannst du nicht so einfach die Mikroschritte auf die echte Untersetzung addieren / multiplizieren.
Mathematisch ist eine Sache aber in Praxis gibt es eine Grenze worüber es kein Sinn mehr macht, die Schritte kleiner zu machen.
Deswegen bleibe ich bei 160 x 6 Zähne bei 200 Motorschritten und 128 Mikroschritten, vor allem weil ich so noch über 1200 siderische Geschwindigkeit erreichen kann.
Bin aber gespannt wie es bei dir so weiter gehet.
Sind deine Harmonic drives selbsthemmend?
Kannst du dein Motor bei 256 Mikroschritte mit deine Hand festhalten?
Grüße
Igor
Hallo Igor,
es sind "nur" 250 Mikroschritte, aber nein: die Motorwelle kann man mit der Hand nicht festhalten (der Motor ist 60*60*60mm, zur Not habe ich noch einen Größeren mit 60*60*90mm mit 1,8Nm, für meine Getriebe eigentlich schon eine Nummer zu Groß, aber man nimmt, was man gerade kaufen kann).
Die Harmonic-Drive sind eigentlich nicht selbsthemmend, aber: wenn ich 2 Stück hintereinander befestige, dann bewegt sich durch die Übersetzung von 1:2500 nichts mehr.
Die hohe Mikroschrittanzahl benutze ich ja auch nur, damit die Motoren so sanft und gleichmäßig wie möglich drehen. Kein Mensch braucht zur Positionierung wirklich über 300 Millionen Takte [:D] pro Umdrehung.
Aber wenn die Motoren mehr als 12 mal so schnell getaktet werden, laufen die einfach ruhiger. Und die Vexta laufen super gleichmäßig, wie man im Video sieht (ich war selbst davon überrascht wie gleichmäßig die laufen).
Ich bin mal auf deinen Rundlauf gespannt, wenn du deine neue Welle hast. Sollte dann eigentlich doch nochmal einiges besser werden.
(Dieses Problem habe ich durch die 2 HD-Getriebe glücklicherweise nicht. Ich montiere die 2 HD und den Schrittmotor direkt hintereinander, so entfallen jegliche Umlenkrollen. Dabei wird alles mit flexiblen Metallbalgen verbunden. Dadurch wird die Einheit zwar lang, aber schlank)
Und da meine Motoren über 2500 Umdrehungen pro Minute laufen können, schaffe ich 1 Umdrehung auch in weniger als 1 Minute. Schneller brauche ich das bei der Genauigkeit nicht.
Und für den Rest hast du ja die Guiding-Unit [;)].
Grüße
Sandor
Laut meinen Informationen ist es so, dass eine Untersetzung/ Übersetzung einen periodischen Fehler aufweist.
Würde es Sinn machen eine Nachführung so zu betreiben das man diesen Fehler der sich als delta Abweichung von der idealen Geraden bemerkbar macht durch Ausgleich bei den Stepperschritten weiter zu minimieren?
Man müsste lediglich eine Nullmessung machen und die Positionen der Zahnräder und Schnecken zueinander mit einer markierung versehen die als Null definiert wird.
Hat das also schon jemand so gemacht?
Grüße Georg
Sie haben noch kein Benutzerkonto auf unserer Seite? Registrieren Sie sich kostenlos und nehmen Sie an unserer Community teil!
