
<center><font size="3"><b>Bau eines computerisierten 25“ f 4 GoTo Dobsons</b></font id="size3"></center>

<font size="2"><b>0. Persönliche Voraussetzungen</b></font id="size2">
Ich betreibe seit 11 Jahren Amateurastronomie mit nicht nachlassender Begeisterung. Mein erstes Teleskop war ein 8“ GSO Dobson, mein zweites ein 18“ Obsession.
Erfahrungen im Selbstbau von Fernrohren hatte ich bisher nicht. Von Berufs wegen bin ich am Schreibtisch tätig. Meine handwerklichen Fähigkeiten sowie mein Werkzeugbestand liegen im Bereich dessen, was man als gelegentlicher Heimwerker so hat und kann: Bohren, Sägen, Leimen, Schleifen, Streichen. Deshalb habe ich auch keinen radikalen Selbstbau angefertigt, sondern einige Dinge zugekauft, insbesondere die Spiegel (Hauptspiegel von Alluna; Fangspiegel von Astrosystems) und die Spinne samt Fangspiegelhalter und Fangspiegelheizung (Astrosystems).
Der Arbeitsaufwand war trotzdem erheblich. Da ich berufsbedingt immer nur phasenweise zum Fernrohrbauen gekommen bin, hat sich das ganze Projekt über ca. 1 Jahr hingezogen.
<font size="2"><b>1. Die Rahmenbedingungen</b></font id="size2">
<font size="2"><b>1.1 Optische Vorgaben </b></font id="size2">
Der Spiegeldurchmesser sollte bei 25“ liegen. Da ich zuvor einen 18“ Dobson benutzt habe, sollte die Vergrößerung der Öffnung einen merklichen Zugewinn bei Grenzgröße und Auflösung erbringen. Daher fiel meine Wahl auf 25“. Ein Dobson dieser Größe paßt auch bei konventioneller Bauweise noch ins Auto. Für noch größere Geräte bräuchte man einen Anhänger, was ich vermeiden wollte.
Das Öffnungsverhältnis sollte nicht unter f 4 liegen, weil ich Schwierigkeiten bei der Komakorrektur sowie bei der Kollimation befürchtete. Andererseits sollte es deutlich unter f 5 liegen, da sonst die Brennweite und die Einblickhöhe zu groß geworden wäre. F 4 schien mir schließlich das geeignete Maß.
Bei der Spiegeldicke wollte ich 2“ nicht unterschreiten, weil ich Verformungen und Einbußen bei der optischen Qualität befürchtete.
<font size="2"><b>1.2 Bauweise</b></font id="size2">
Damit war ein Leichtbau praktisch schon ausgeschieden, denn ein entsprechender Spiegel wiegt um die 37 kg. Die Leichtbauweise scheint mir ohnehin nur dann sinnvoll zu sein, wenn man sein Teleskop tragen will, z.B. als Reiseteleskop, was ich aber nicht vor habe. Außerdem: Eine konventionell gebaute Rockerbox plus Spiegelbox plus Spiegel dieser Größe wiegt ca. 90 kg. Dies als Schubkarre zu bewegen ist allemal leichter, als ein Leichtbauteleskop von 30 kg aus dem Auto zu heben. Zudem schätze ich die Stabilität der klassischen Dobson Konstruktion.
Auch ein Lowrider kam für mich nicht in Frage, weil man mit 25“ f 4 die Füße ohnehin nicht mehr auf den Boden bekommt und somit auf jeden Fall eine Leiter benötigt. Mit 175 cm Körpergröße stehe ich bei Beobachtung im Zenith auf der vierten Sprosse. Das empfinde ich als vertretbar. Auch bei unebenem Gelände muß man noch keine Angst haben, mit der Leiter umzufallen.
Da ich das Teleskop im Opel Zafira transportiere, habe ich mich immer auch an der Größe des Kofferraums dieses Autos orientiert. Beispielsweise habe ich aus diesem Grund jene Bauweise gewählt, bei der die Stangen außen an der Spiegelbox befestigt werden, statt innen. Dadurch wird die Spiegelbox kleiner und entsprechend spart man bei den Abmessungen der Rockerbox schließlich einige Zentimeter in jeder Richtung. Das ist nützlich, weil beim Transport im Auto neben dem Teleskop noch Platz sein muß für die Stangen, die Rampenbretter etc.

<font size="2"><b>1.3 Digitale Teilkreise und Motorisierung</b></font id="size2">
Ich benutze seit vielen Jahren das Argo Navis (Digitale Teilkreise) und den ServoCat (GoTo, Tracking, Autoguiding und vieles mehr). Da ich nicht zu denjenigen gehöre, die spezielle Freude am Suchen haben, sondern lieber Objekte beobachte, betrachte ich das Argo Navis als großen Vorteil. Zusammen mit der GoTo Funktion des ServoCat fährt das Teleskop die angewählten Objekte auf Knopfdruck an. Weiterhin entfällt mit der Nachführung durch den ServoCat das Schubsen des Dobsons. Vielmehr bleibt das Objekt beliebig lange im Gesichtsfeld, so daß man sich ganz auf die Beobachtung der Details konzentrieren kann. Dies ist etwa bei schwachen Deep Sky Objekten, die sich an der Wahrnehmungsgrenze befinden, oder bei hohen Vergrößerungen von unschätzbarem Wert. Meiner Meinung nach sieht man auf diese Weise bei gleicher Optik einfach mehr. Auf Argo Navis und ServoCat würde ich keinesfalls mehr verzichten wollen, schon gar nicht beim großen Dobson.
Da das System in jeder Achse Encoder benötigt und auch die beiden Antriebsmotoren an der Rockerbox montiert werden müssen, legte sich abermals die klassische Bauweise nahe mit einem Drehteller (also kein Ring), einer Rockerbox mit geschlossenem Boden und einem „pivot bolt“ in der AZ Achse, auf den der AZ Encoder montiert wird. Der ALT Encoder muß auf der Drehachse des Tubus sitzen. Dafür habe ich die Bauweise mit hoher Spiegelbox gewählt, derzufolge die Drehachse genau auf der Oberseite der Spiegelbox liegt, so daß der ALT Encoder seitlich an der Oberkante der Spiegelbox befestigt werden kann. (Erst später habe ich gesehen, daß Dieter Martini spezielle Höhenräder anbietet, an denen man den ALT Encoder montieren kann, so daß sich die Spiegelbox auch flacher bauen läßt.)
Insgesamt legte sich also die Obsession Bauweise für mich nahe, zumal ich aus dem Buch von David Kriege und Richard Berry (The Dobsonian Telescope) viele wertvolle Hinweise gewinnen konnte.
<font size="2"><b>2. Die Spiegelzelle</b></font id="size2">
Die 18 Punkt-Spiegelzelle habe ich aus Gewichtsgründen und wegen der leichteren Verarbeitung aus Aluminium gefertigt, nicht aus Stahl.
Außenmaß: 703 x 550 x 40
Teile:
3 Sprossen: 30 x 30 x 3 mm Alu Vierkant Rohr, je 683 lang.
2 Seitenteile: 40 x 10 mm Alu Flachstange, je 550 lang.
6 Dreiecke aus 3 mm starkem Stahl
3 Träger für je 2 Dreiecke aus 260 x 30 x 5 mm Stahl
Diese Teile habe ich über das Internet bestellt (Metallstore.de).
Den Abstand der Sprossen und die genaue Position der Bohrungen habe ich mit PLOP ermittelt.
Die glatten Bohrungen in den Aluminium Teilen habe ich selbst ausgeführt, die Gewindebohrungen für die drei Kollimationsschrauben (M 10) hat ein Freund für mich geschnitten, der entsprechendes Werkzeug besitzt und sich mit Metallverarbeitung auskennt.
Die Bohrungen in den Stahlteilen, die man aufgrund der Härte des Materials nur schlecht selbst machen kann, habe ich gleich dort ausführen lassen, wo ich die Teile per Internet bestellt habe. Das kann man aber auch alles in der örtlichen Schlosserei für wenig Geld machen lassen.
Schließlich habe ich die 3 Sprossen und die 2 Seitenteile von meinem örtlichen Fensterbauer zu einer Rahmenkonstruktion zusammen schweißen lassen. (Nicht jede Schlosserei kann Aluminium schweißen.)
Bei Neigung des Tubus wird der Spiegel seitlich von einem Gurt gehalten, der seinerseits an zwei Bolzen befestigt ist.
Ich hatte zunächst Angebote über eine fertige Spiegelzelle von Firmen teils in Deutschland, teils in den USA eingeholt. Die Kosten schienen mir aber unverhältnismäßig hoch, so daß ich mich zum Selbermachen entschlossen habe. Am Ende hat der Selbstbau der Spiegelzelle nur einen Bruchteil dessen gekostet, was diese Firmen veranschlagt hatten.
<font size="2"><b>3. Die Spiegelbox</b></font id="size2">

Die Spiegelbox habe ich aus 15 mm Birke Multiplex (Baumarkt) gebaut.
Innenmaß: 705 x 705 x 524
Das Innenmaß der Spiegelbox ist also etwas größer als das Außenmaß der Spiegelzelle. Dies ist ratsam, damit die Zelle auch dann noch in die Spiegelbox paßt, wenn die Aluminium Teile nicht ganz genau im rechten Winkel verschweißt wurden.
Außenmaß: 735 x 735 x 530
a) Rückwand: 705 x 524
b) Vordere Wand: 705 x 450
c) Linke Seitenwand
a. Obere Kante: 735
b. Untere Kante (von links gemessen): 585
c. Linke Kante 524
d. Rechte Kante (von oben gemessen) 450
Die rechte untere Ecke wird also abgeschnitten, damit die Spiegelbox tief in der Rockerbox sitzen kann, ohne daß die vordere Kante beim Neigen des Tubus auf den Boden der Rockerbox stößt.
d) Rechte Seitenwand spiegelbildlich entsprechend c)
e) Deckplatte: 735 x 735 x 6 mm – in der Mitte ein kreisförmiger Ausschnitt von 685 mm Durchmesser
f) Deckel: Kreisrund, Durchmesser 725 mm, 6 mm stark.
Zur Verstärkung habe ich Metallwinkel in die Ecken der Spiegelbox eingeschraubt (von außen nicht sichtbar) und in die oberen Ecken Holzdreiecke geleimt, teils zur Stabilisierung, teils damit die Deckplatte besser aufliegt.
<font size="2"><b>4. Die Höhenräder</b></font id="size2">
Höhenräder: Durchmesser 812 mm
Die Höhenräder hat Dieter Martini nach meinen Plänen aus Birke Multiplex gefertigt – übrigens sehr preisgünstig – und mit Ebony belegt.
Die Anbringung der Höhenräder zusammen mit der Gestaltung der entsprechenden Ausschnitte in der Rockerbox erforderte einige Überlegung. Denn erstens sollte man den Tubus um (fast) 90° neigen können, ohne daß die Höhenräder von den vorderen Teflonpads rutschen; zweitens sollten die Spitzen der Höhenräder aber nicht zu hoch stehen, weil sie sonst beim Einladen ins Auto an der Oberkante der Heckklappenöffnung anstoßen; und drittens verlangt der ALT Motor des ServoCat, daß das Höhenrad auch in Zenithstellung noch ein wenig nach hinten über den Rockerboxausschnitt hinausragt. (Das ist zum Beispiel bei den Telekits nicht der Fall.)
Ein gewisser Nachteil derjenigen Bauweise, in der die Stangen außen an der Spiegelbox angebracht werden, liegt darin, daß 2 Stangen mit den Höhenrädern kollidieren. Deswegen mußte ich an diesen Stellen ein Stück aus einer Speiche der Höhenräder herausschneiden, um Platz für die Stangen zu bekommen. Aus Stabilitätsgründen habe ich diese Lücke in der Speiche dann von außen mit einem Holzstück überbrückt.

<font size="2"><b>5. Die unteren Klemmungen der Stangen:</b></font id="size2">

Diese sind aus Ahorn gefertigt. Dabei bin ich dem Prinzip der split-block sockets aus dem Buch von Kriege / Berry gefolgt. Die 8 Blöcke haben folgende Abmessungen:
Höhe: 85 /Breite: 95 / Stärke: 50 Durchmesser der Bohrung: 38.
Ich habe den Block ganz durchgebohrt und hinterher unten ein kleines Brett als Anschlag angebracht.
(Ursprünglich hatte ich daran gedacht, den Dobson auch für die Astrophotographie zu nutzen, denn der ServoCat kann auch Autoguiding. Statt dafür den Hauptspiegel anzuheben, oder ein zweites, kürzeres Set Stangen bereit zu halten, wollte ich die Stangen tiefer durch die Blöcke hindurch schieben können, um ein variables Maß an Backfocus zu gewinnen. Diesen Plan habe ich aber aufgegeben. Inspiriert hat mich dazu übrigens die untere Stangenklemmung bei Webster Telescopes.)
Für die Schraube, mit der man die Stange schließlich einklemmt, habe ich M 8 gewählt sowie einen entsprechenden Sterngriff.
Diese Blöcke habe ich über einen Bekannten machen lassen, der Zugang zu einer Schreinerei hat. Denn die 38 mm Bohrungen für die Stangen kann man nicht mehr aus der Hand ausführen. Dafür braucht es eine Maschine samt Bohrständer. Die Bohrspitze mußte ich selbst besorgen, denn 38 mm ist kein gängiges Maß. Über das Internet konnte ich sie auftreiben.
Die genaue Ausrichtung der Blöcke erfordert etwas Fingerspitzengefühl, denn die Stangen müssen sich später in der Mitte treffen und sie müssen ein wenig nach innen geneigt sein.
Im Nachhinein muß ich sagen, daß es sicher einfachere Lösungen für die untere Stangenklemmung gibt, als die von mir gewählten split blocks, selbst dann, wenn man die Stangen außen an der Spiegelbox anbringen will. In Frage käme beispielsweise das System, das Spheretec anbietet, oder die Lösung von Webster Telescopes.
<font size="2"><b>6. Der Drehteller</b></font id="size2">
Die Abmessungen des Drehtellers betragen 770 mm Durchmesser, also etwas kleiner als die schmale Seite der Rockerbox, bei 18 mm Dicke. Die drei Füße sind 30 mm hoch und haben 50 mm Durchmesser.
<font size="2"><b>7. Die Rockerbox</b></font id="size2">
Das Innenmaß der Rockerbox sollte an jeder Seite 5 mm größer sein als das Außenmaß der Spiegelbox. In meinem Fall bedeutete das eine Grundfläche von 745 x 745. Für den Boden und die beiden Seitenteile habe ich doppelte Stärke gewählt, also 2 x 18 = 36 mm. Die Seitenteile sind an der höchsten Stelle 325 mm hoch. Daraus ergeben sich folgende Maße für Seitenteile und Boden:
a) 2 Stück Seitenteile: 745 x 325 x 36
b) Vorderes Brett: 817 x 250 x 15
c) Hinteres Brett 817 x 110 x 15
d) Boden 745 x 745 x 36
Die Seitenteile werden außen am Boden befestigt, wobei das vordere und das hintere Brett durchgehen.
Daraus ergibt sich das Außenmaß der Rockerbox: 817 x 775 x 325
An den Seitenteilen ist mittig ein kreisförmiger Ausschnitt anzubringen, in dem später die Höhenräder der Spiegelbox liegen. Der Radius des Ausschnitts ist gleich dem Radius der Höhenräder plus die Dicke der Teflonpads, in meinem Fall also 406 mm + 4 mm = 410 mm.
Der Scheitelpunkt des Ausschnitts liegt ca. 245 mm mittig über der unteren Kante des Seitenteils. Dies ist so berechnet, daß die Spiegelbox möglichst tief in der Rockerbox sitzt, aber noch über den AZ Encoder hinweg, der sich in der Mitte der Rockerbox befindet, frei durchschwingen kann. Das Winkelmaß des Ausschnitts beträgt etwa 70°.
Den Ausschnitt kann man mit einer Oberfräse und entsprechendem Zirkel machen, oder man bringt die Teile in eine Schreinerei, und läßt es dort per CNC Maschine schneiden. Die oberen Ecken der Seitenteile habe ich aus optischen Gründen abgeschrägt.
Die Unterseite der Rockerbox wurde mit einem entsprechend großen Stück Ebony Star, gekauft bei ICS Augsburg, beklebt (Kontaktkleber).
<font size="2"><b>8. Installationen an der Rockerbox</b></font id="size2">

Die Rockerbox bekommt genau in der Mitte des Bodens eine durchgehende Bohrung, der Drehteller ebenfalls genau in der Mitte. Beide werden mithilfe eines Bolzens verbunden, so daß die Rockerbox sich über dem Drehteller drehen kann.
Ich habe dazu das „pivot kit“ von Astrosystems gekauft. Es enthält den entsprechenden Bolzen, der auch bereits eine Aufnahme für den Schaft des AZ Encoders besitzt, und vier Teflon Pads. Je eines wird auf dem Drehteller über jedem Fuß angebracht, und das vierte zur Entlastung der Füße in der Mitte, so daß der „pivot“ Bolzen genau hindurch geht.
Weiterhin habe ich die zentrale Stromversorgung bei Astrosystems gekauft („power feed through“). Man hat dann eine Steckdose an einem Fuß des Drehtellers, von wo der Strom über die Mitte der Rockerbox zu einer Schalterleiste in der Rockerbox geführt wird. Damit steht für alle Verbraucher im Fernrohr Strom zur Verfügung, ohne daß sich beim Drehen des Fernrohrs ein Kabel aufwickeln könnte. Der Akku steht etwa 3 Meter vom Fernrohr entfernt und ist über ein stabiles Kabel mit der Steckdose verbunden.
Allerdings benutze ich dieses System nun doch nicht, weil ich befürchte, daß ein Kabel, das neben dem Fernrohr auf dem Boden liegt, eine Stolperfalle darstellen könnte, zumal im Dunkeln, wenn man schon müde und unkonzentriert ist oder Beobachtungsgäste hat.
Deshalb hänge ich stattdessen rechts und links je einen 7 Ah Akku an die Rockerbox – einen für den ServoCat, und einen für das Argo Navis und die Hauptspiegelbelüftung. Die beiden Akkus fahren einfach mit, wenn sich das Fernrohr dreht, und es gibt keine herumliegenden Kabel, über die man stolpern könnte.
Den ServoCat habe ich außen am vorderen Brett der Rockerbox angebracht, der AZ Motor sitzt innen in der Rockerbox und dreht das Teleskop – wenn eingekuppelt wird - über eine Walze, die außen am Drehteller entlangläuft.
Alle Motorkabel und alle Encoder Kabel habe ich fest in der Rockerbox verlegt. Für das Argo Navis habe ich aus Aluminium Vierkant Rohr einen Stiel mit einem kleinen Pult gebaut und die notwendigen Anschlußkabel dort hin gelegt. Beim Aufbau muß man lediglich das Argo Navis in seine Halterung legen und drei dort bereit liegende Kabel einstecken.

In den kreisförmigen Ausschnitten an den Seitenteilen der Rockerbox braucht man Teflonpads, auf denen sich die Höhenräder der Spiegelbox bewegen, wenn sich der Tubus neigt. Falls man den ServoCat verwendet, benötigen diese Teflonpads auf derjenigen Seite, auf der der ALT Motor sitzt, in der Mitte der Länge nach eine Rille. Denn dort läuft das Drahtseil entlang, über das der Motor den Tubus auf und ab bewegt. Entsprechend angefertigte Pads bekommt man bei Obsession, Astrosystems und Stellarcat (dies ist der Hersteller des ServoCat).
<font size="2"><b>9. Das Fahrgestell</b></font id="size2">

Beim Ein- und Ausladen bewege ich die Rockerbox samt Spiegelbox wie eine Schubkarre. Dazu habe ich am Vorderen Brett der Rockerbox je ein Luftrad samt Halterung angebracht. Es handelt sich dabei um Stützräder für Anhänger, deren oberen Teil mit der Kurbel ich abgeschnitten habe. Die Resthülse wurde mit dem inneren Rohr, an dem sich das Rad befindet, verschweißt. Die Halterungen sind fest an der Rockerbox montiert. Wenn ich das Fernrohr am Beobachtungsort aus dem Auto gerollt und an seinen Standort gefahren habe, löse ich die Räder in ihren Halterungen und schiebe sie ein wenig nach oben, damit das Fernrohr sich frei drehen kann. Beim Abbauen lasse ich die Räder wieder nach unten auf den Boden.
Hier sind übrigens unbedingt Luftreifen erforderlich, denn Vollgummireifen blockieren an jedem noch so kleinen Steinchen.
Im hinteren Teil der Rockerbox habe ich 4 u-förmige Metallstücke mittels durchgehender Schrauben angebracht. Sie haben 30 mm freie Öffnung. Dort stecke ich zwei 28 mm Alu Vierkant Stangen ein (ca. 160 cm Länge), die mir als Schubkarrengriffe dienen. Die Stangen schlagen beim Hereinstecken an zwei Holzklötzchen an. Eine weitere Arretierung ist nicht notwendig – das Gewicht des Fernrohrs sorgt dafür, daß die Stangen nicht ungewollt nach hinten herausrutschen können. Wenn das Fernrohr an seinem Platz steht, ziehe ich die Stangen heraus und lege sie ins Auto.
Die beiden Stangen kann ich noch mit einem Querholm verbinden. Dann kann ich mein Körpergewicht besser einsetzen, um das Fernrohr über die beiden Rampenbretter ins Auto hinauf zu schieben. Dies ist der Moment, in dem der größte Kraftaufwand nötig ist. Im Prinzip ist das für einen Mann kein Problem. Allerdings geschieht dies in der Regel tief in der Nacht an einem sehr einsamen Ort, wenn man hundemüde und durchgefroren ist. Hier ist für mich Sicherheit oberstes Gebot.
Es war mir wichtig, die Schubkarrengriffe nicht wie bei Obsession üblich von der Seite her an die Rockerbox anzuschrauben, weil dazu in meinem Opel Zafira nicht viel Platz ist. Deshalb habe ich die Konstruktion des Fahrgestells so gewählt, daß die Rockerbox dadurch nicht breiter wird.

<font size="2"><b>10. Der Hut</b></font id="size2">

Der Hut besteht aus zwei Birke Multiplex Ringen mit Innendurchmesser 670 und Außendurchmesser 770 mm. Die Breite beträgt also 50 mm. Die Dicke beträgt 15 mm.
Diese Ringe kann man sich selbst mittels Oberfräse und Zirkel aus einer entsprechenden Platte ausschneiden, oder man läßt dies in einer Schreinerei per CNC machen.
Die beiden Ringe werden durch 4 Holzstreben (40 x 40 x 330) und das Brett für den OAZ (120 x 10 x 330) miteinander verbunden.
Schließlich wurde der Hut ausgekleidet mit 1 mm starkem, matt schwarz gestrichenem Flugzeugsperrholz. Ich wollte eigentlich Kydex verwenden, habe es aber nirgendwo bekommen.
Spinne, Fangspiegelhalterung samt Heizung sowie Fangspiegel (4,5“) habe ich bei Astrosystems gekauft.
Der OAZ ist ein NGF DX 2 mit Motor von Jim’s Mobile.
<font size="2"><b>11. Der Hilfsring</b></font id="size2">

Der Hut wiegt ca. 7 kg und hat einen erheblichen Durchmesser. Es ist sehr unbequem, mit dem Hut in der Hand auf die Leiter zu steigen und ihn von dort aus auf die Stangen zu setzen. Man muß sich dabei so weit zur Seite neigen, daß die Leiter ins Schwanken kommen kann.
Deshalb habe ich einen dritten Ring („Hilfsring“) angefertigt mit dem gleichen Maß wie die beiden Ringe des Hutes. An diesem Ring habe ich die oberen Stangenklemmungen angebracht, sowie drei Zapfen, denen Löcher im unteren Ring des Hutes entsprechen. Den Hilfsring kann man von der Leiter aus sehr leicht aufsetzen und arretieren, da er fast nichts wiegt. Wenn die Stangenklemmungen einmal fixiert sind, verhält sich das Truss-System wie ein in sich stabiles, belastbares Gerüst.

Am vorderen Ende des Hilfsringes habe ich eine lange Schlaufe befestigt. Um nach der Anbringung des Hilfsringes den Hut aufzusetzen, stehe ich vor dem Teleskop auf dem Boden, ziehe den Tubus zu mir herunter und halte ihn dort, indem ich mit einem Fuß in die Schlaufe trete. Damit habe ich beide Hände frei, um den Hut mit seinen Löchern in die vorgesehenen Zapfen des Hilfsrings zu setzen. Mit 4 Schnappverschlüssen wird der Hut dann auf dem Hilfsring gesichert. Das funktioniert beim Auf- und Abbau völlig bequem und ohne jede Anstrengung.

Die obere Stangenklemmung habe ich bei Obsession gekauft. Sie erschien mir stabiler als das System der Telekits. Das 1.5“ System von Obsession funktioniert gut mit 38 mm Aluminium Rohren, Wandstärke 1,5 mm.
<font size="2"><b>12. Die Stangen</b></font id="size2">

An die richtige Länge der Stangen muß man sich mit Rechnen, aber auch mit Versuch und Irrtum heran arbeiten. Bei mir beträgt sie 1680 mm. Man kann die Rohre durch Sägen kürzen. Es gibt aber auch ein sehr günstiges Werkzeug, mit dem man das Rohr rundherum abschneidet.
Ich habe die Rohre in eine Schaumstoffisolierung gesteckt, wie man sie im Baumarkt bekommt. Dadurch sind sie auch bei Kälte bequem anzufassen.
<font size="2"><b>13. Streulichtschutz</b></font id="size2">

Als Streulichtschutz habe ich bei Astrosystems eine entsprechend große „light shroud“ gekauft.
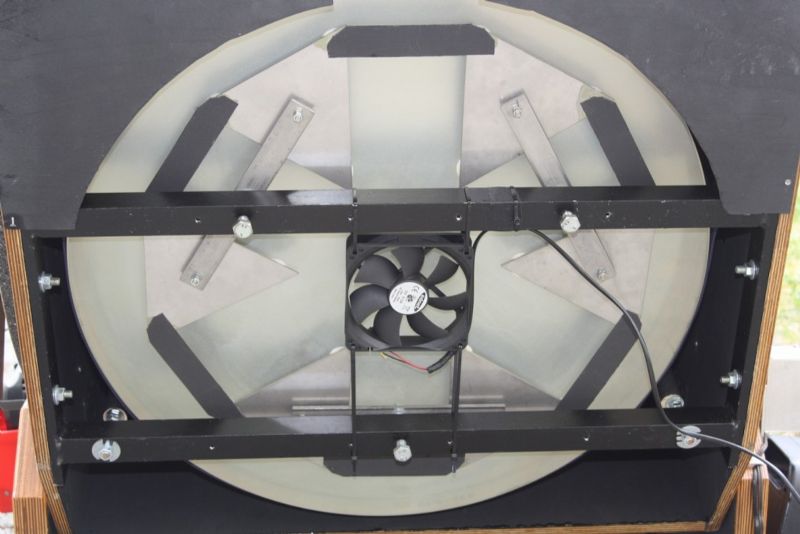
An die Unterseite der Spiegelbox hinter dem Hauptspiegel habe ich einen Streulichtschutz aus matt schwarz lackiertem Sperrholz angebracht, um zu verhindern, daß von unten her unerwünschtes Licht in den Fangspiegel fällt. Allerdings verschließt das Sperrholz die Öffnung hinter dem Hauptspiegel nur teilweise, um den Temperaturausgleich nicht zu sehr zu behindern.
Ein Streulichtschutz gegenüber dem OAZ schien mir aufgrund der hohen Bauweise des Hutes nicht nötig.
<font size="2"><b>14. Benutzte Literatur und Software</b></font id="size2">
a) Reichlich Gebrauch habe ich gemacht von David Kriege, Richard Berry: The Dobsonian Telescope. Dort sind viele Maße angegeben, allerdings sämtlich in Inches.
b) Software: PLOP zur Berechnung der Spiegelzelle
c) Software: MyNewton
d) Software: Newtwin
e) Software: Doug’s Dobsonian Telescope Weight and Balance Calculations (Kriege and Berry inspired spreadsheat)
Es handelt sich dabei um eine Excel Datei, in die man bestimmte Daten eingibt, z.B. Durchmesser des Spiegels, Stärke des Holzes etc. Das Programm rechnet einem dann alles aus von der Lage der ALT Drehachse über dem Boden der Rockerbox, bis hin zur geforderten Größe der Teflonpads. Besonders hilfreich ist die automatische Berechnung der Drehmomente, denn sie gibt Aufschluß darüber, ob der Tubus hinterher im Gleichgewicht ist, oder ob er nach hinten oder – noch schlimmer – nach vorne runterkippt.
Bei meinem 25“ Dobson hat es übrigens genau gepaßt. Ohne Okular ist er ganz leicht hecklastig, so daß er beim Aufbau jedenfalls nicht vorne rüber fällt. Mit einem größeren Okular im OAZ befindet sich der Tubus genau im Gleichgewicht.
<font size="2"><b>15. Aufbau und Beobachtung</b></font id="size2">
Von der Ankunft am Beobachtungsort bis zur ersten Beobachtung brauche ich ca. 30 Minuten Aufbauzeit, inclusive Kollimation und Zwei-Stern-Alignment des Argo Navis. Die Stabilität läßt nicht zu wünschen übrig. Bei Wind verhält sich der 25“ f 4 sogar ruhiger als mein früherer 18“ f 4.5, obwohl er höher ist. Das Problem bei Wind ist nicht, daß der Tubus sich wegdrehen würde, sondern daß er anfängt zu vibrieren. Dann sind nur noch niedrige Vergrößerungen möglich.
An der Leiter habe ich zwischen den regulären Sprossen noch „halbe“ Stufen angebracht. Das hat sich als sehr nützlich erwiesen.

<font size="2"><b>16. Resultat</b></font id="size2">
Insgesamt ist mit begrenzten handwerklichen Mitteln ein großer Dobson entstanden, der aufgrund seiner Öffnung, seines guten Spiegels und der Computerisierung/Motorisierung sehr viel Freude beim Beobachten macht. Zwar ist die Bauweise, gemessen an den vielen Innovationen im ATM Bereich, eher konventionell. Doch sie gewährt volle Mobilität und sehr gute Funktionalität.
Johannes
