Hallo zusammen,
ich habe schon seit fast 3 Monaten Probleme mit meinem Guiding. Ich benutze ein Skylux Lidlscope mit einer AlCCD5 auf meiner Selbstbaumontierung zum guiden. Als Fotografiergerät hängt ein 200/1000 er Newton dabei.
Mein Problem: Die Deklination
Ich weiß eigentlich sollte das Autoguiding nur für die Rektazensionsachse benutzt werden und streng genommen (bei genauer Aufstellung) braucht man keine Deklination. Aber ich stelle das teil immer so Pi mal Daumen hin und hoffe, dass ich einen Leitstern in der Nähe des zu fotografierenden Objekts finde und dass sich die Bildfeldrotation nicht zu heftig auswirkt.
Auf diese Weise sind mir schon äußerst zufriedenstellende Aufnahmen gelungen. Aber seit ca 3 Monaten bekomme ich nichts mehr auf die Reihe. Die Deklination springt wie verrückt.
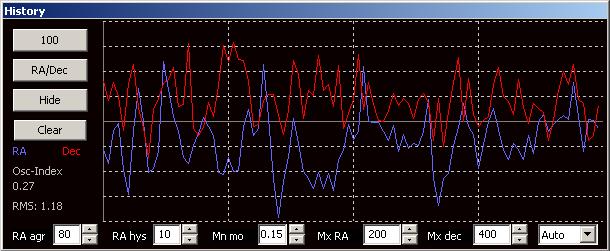
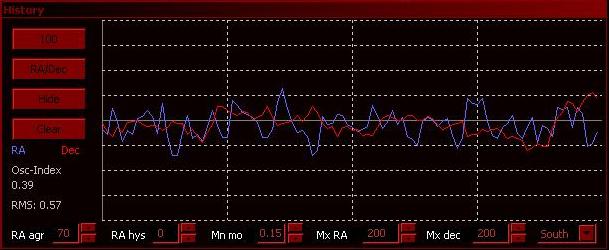
Ich versuche mal den PHD Graphen zu beschreiben. Über wenige Sekunden hält sich der Graph in der Nähe der Nulllinie auf, ehe er nach unten abschmiert (außerhalb des Anzeigebereiches) um dann nach 10-15 Sekunden wieder an die Nullinie anzukommen, darüberhinauszuschießen und dann wieder bei der Nullinie anzukommen. Das Spiel wiederholt sich dann. Veränderungen an der Aggressivität und der Hysteresis konnten nichts daran ändern (die sind meines Erachtens auch nur für die Rektazensionsachse gültig, oder werden diese Werte für die Deklination mit übernommen?).
Dann habe ich versucht die Geschichte anders anzugehen. Wenn PHD in der Deklination nur einen einfachen Regler ohne Einstellmöglichkeiten hat, dann kann ich wenigstens mit den Fahrtzeiten eingreifen. Also habe ich die maximale Fahrtzeit für die Deklination auf 60ms runtergeschraubt. Das hat zumindest das "überschießen" der Nulllinie verhindert. Dennoch ist die ganze Sache ziemlich frustrierend.
Wenn man einen Menschan dadran setzen würde, würde man sagen "Mann siehst du nicht, dass du schon wieder so abschmierst wie vor 20 sec?" Aber ich glaube da fehlt mir das passende Plugin für Frustinput in den rechner.
Nebenbei bemerkt: Mechanische Ursachen kann ich mit Sicherheit ausschließen. Antriebsriemen sind wiederholt gespannt worden, kein Spiel bei den Zahnriemenscheiben. Das war schonmal die Ursache für Guidingprobleme und deswegen bin ich da sehr hellhörig geworden.
Es wäre toll, wenn mir jemand sagen könnte, woran das liegt, dass des Gerödel nciht funktioniert. Vielleicht hat ja jemand ähnliche Erfahrungen gemacht?
Wäre toll, wenn sich jemand melden würde!
Danke schonmal im voraus!
Viele Grüße
Michael