
Servus in die Runde !
A.D. 2010 beginnt der Bau eines größeren Newton.
Ursache: Aus der „Bucht“ wird ein feiner 20-zölliger Spiegel für einen wahren Schnäppchenpreis gefischt…

… da muss unbedingt ein Teleskop herum gebaut werden !
Dieser Spiegel
- Oldham # 506 R 4534
- f = 2267
- f / D = 4,48
war bereits vor Jahren durch den Zeiss-Referenzspiegel #22 vermessen worden:

Zugegebenermaßen ist die Spiegelfläche im Randbereich nicht eben „erste Sahne“ (s. oben, jedoch immerhin Strehl 0,97.
Recht schnell werden eine klassische Gitterstruktur samt Spiegelzelle entworfen und gebaut.
Temperaturbedingte Längenvariationen der hier verwendeten Aluminium-Streben (2,4E-5 / K) werden als vernachlässigbar betrachtet, da ggfls. unmittelbar erkennbar und kompensierbar.
Es ist eh‘ nicht beabsichtigt; mit langen bis zu extrem langen Belichtungszeiten zu arbeiten, sondern „Stacking“ zahlreicher Kurzzeitbelichtungen durchzuführen.
Die folgenden Abbildungen schematisieren den Aufbau dieses Teleskops.


Fangspiegel (120 mm x 170 mm) samt Halterung: Teleskop-Service Ransburg https://www.teleskop-express.de/shop/
Der „Hut“ stammt von Dieter Martini http://www.dietermartini.de/ .
Das Teleskop selbst wurde in 2011 fertiggestellt und ist seitdem in einer einfachen Alt-Azimut-Montierung gelagert (nicht sonderlich aufregend).

Der Primärspiegel ruht in seiner Spiegelzelle auf einem klassischen „Whiffle-Tree“ mit
27 Auflagepunkten, um dessen Masse gleichmäßig aufzunehmen.
Mag übertrieben erscheinen, war jedoch innerhalb weniger Stunden erstellt:
- 10 mm Aluplatten (Dreiecke) mit Senkbohrungen
- 10 mm Stahlkugeln in diesen Senkungen zwischen den Plattenebenen
- Stahlkugeln gegen „Weglaufen“ mit elastischem Silikonkleber fixiert
- Kleine Filzscheiben als Spiegelauflage
- Fertig !

Drei kleine Ventilatoren sorgen bei Bedarf für eine mehr oder minder rasche Akklimatisierung des Spiegels. Kritikpunkt: Sollten zwecks flächiger Belüftung des Spiegels wohl tiefer angebracht werden.
Alle Komponenten des Teleskops, also Spiegelzelle, Zwischenring sowie das Oberteil sind aus solidem Multiplex (MPX)-Platten unterschiedlicher Dicke gefertigt.
Diese Platten sind durch Quergewindebolzen miteinander verbunden (auch bekannt durch Bausätze eines nordeuropäischen Möbelhauses).
Je nach aktueller Ausrüstung im Fokalbereich wird das Teleskop mittels austauschbarer Massen in allen Achsen neutral getrimmt.
So good, so far …
… diesem optischen Projekt kommt 2017 ein ebenfalls selbstgebautes 4 m Radioteleskop in die Quere, welches erstmal erstellt werden will (Struktur ebenso komplett in Holz).

Jahre später, der Newton selbst ist ja fertig …
… im Januar 2023 beginnt die Realisierung einer passenden parallaktischen Montierung:

Die folgende Abbildung zeigt die wesentlichen Bauelemente:

An sich nichts Besonderes, ein konventionelles Hufeisen-Design; allerdings mit einem mächtigen V-Verbinder von der Äquatorplatte zum Südlager (Querschnitt 100 mm x
100 mm).
Generell kommen auch hier dicke bis SEHR dicke MPX-Platten zum Einsatz.
Die Spiegelzelle des Teleskops ist in zwei Gabeln gelagert, welche mit je zwei 10 mm Gewindebolzen in der Äquatorplatte befestigt und nach außen zusätzlich durch je zwei Stützten verstärkt sind. Hieraus resultiert zwangsweise eine verwindungssteife Anordnung; also keine seitliche Parallelogramm-artige Verschiebung möglich.
Deklinationsachse und Stundenachse werden durch Schrittmotore angetrieben:
Rektaszension: Rechteckgenerator mit Frequenz für siderische Bewegung (s. unten)
Zusätzlich: Dekadischer / variabler Rechteckgenerator für schnellen Vor- / Rücklauf; analog für Deklination.
Daten der Antriebe:
- Motore (Vollschritt: 1,8°)
- 1/16 Schritt: 0,11°
- Zweifaches Planetengetriebe 512:1
- Untersetzung Antriebsrad / Äquatorplatte: 15,94
- Winkel an Stundenachse pro 1/16 Schritt: 0,049 arc sec (REIN THEORETISCH)
Jedoch zumindest eine solide Grundlage für anstehende Erprobungen.
Nachfolgend eine kurze Beschreibung der einzelnen Komponenten der Montierung selbst („von unten nach oben“):
Unterbau zur Grundplatte
- Stapelbare Sperrholzplatten (20 mm x 300 mm x 300 mm) für die grobe Nivellierung
- 3 x Blöcke (Kantenlänge 100 mm) als Unterbau für die Stellfüße der Grundplatte (der Antriebsblock für die Rektaszension wird nach unten etwas aus der Grundplatte herausragen).
Allgemein
Es sei an dieser Stelle angemerkt, dass innerhalb der Montierung alle Übergänge zwischen Schraubenköpfen bzw. Muttern zu glatten Oberflächen durch dreifache durchmesser-gestaffelte Unterlegscheiben erfolgen, um eine möglichst gleichmäßige Kraftverteilung zu gewährleisten.
Grundplatte

Material: 40 mm MPX
Teleskop samt Montierung ruhen auf dieser Platte. Selbige ist mit drei M10-Stellfüßen (2 x im Norden sowie 1 x im Süden) auf obigen 100 mm Blöcken gelagert (Fein-Nivellierung). Diese Platte ist mit einem Bull’s Eye (5/1000 Skalierung) sowie einen Kompass (0,1° Ablesung) bestückt.
Des Weiteren sind hier die beiden Nordlager für die Äquatorplatte sowie das Südlager für den V-Verbinder befestigt.
Nordlager

Material: 95 mm MPX
Auf diesen Beiden ruhen die Äquatorplatte und somit das Teleskop (teilweise). Deren Last wird durch je ein 62 mm x 16 mm Pendelkugellager aufgenommen.
Die Fixierung zur Grundplatte erfolgt durch je eine M10 x 120 Schraube.
Das Westliche der Nordlager wird in absehbarer Zeit durch einen motorischen Antrieb ersetzt.
Das Südlager ist ähnlich zu den Nordlagern aufgebaut; nimmt jedoch primär die Nord-Süd Komponente der Last der Montierung durch den V-Verbinder (s. unten) auf und leitet die restlichen Kräfte in die Grundplatte.
Die Fixierung zur Grundplatte erfolgt ebenfalls durch eine M10 x 120 Schraube.
V-Verbinder

Material: 100 mm x 100 mm MPX (Querschnitt)
Dieses Element übernimmt die Last der Äquatorplatte und leitet sie auf das Südlager (s. oben).
Dessen nördliche beide Enden sind durch zwei lange, mittig eingelassene / eingeharzte M10 Gewindebolzen mit der Äquatorplatte verbunden. Das andere Ende mündet mit seinem
eingeharzten 10 mm Stahlbolzen im Südlager
Äquatorplatte

Material: 30 mm MPX
Diese Komponente ist parallel zum Himmelsäquator orientiert (daher der Name) und stellt das primäre mechanische Interface zwischen dem Teleskop und der Grundplatte dar.
Die Verbindung zum Teleskop erfolgt durch zwei Gabelstützen (s. u.).
Die Verbindung zur Grundplatte erfolgt durch den massiven V-Verbinder (s.o.).
Präzise kreisrunde Bearbeitung des Außenrandes dieser Scheibe (vertikal zu deren Oberfläche) mittels Oberfräse.
Zusätzlich wurde dieser Rand für den vorgesehenen Reibradantrieb mit einem 25 mm breiten Band (https://www.tesa.com/en/consumer/tesa-anti-slip-tape.html) belegt.
Auf diesem Rand rollt die Äquatorplatte als Stundenachse auf den beiden Nordlagern mit 15 ° / h.
Gabelstützen
Links: Innenseite, rechts: Außenseite

Material: 27 mm MPX
Auf der Nordseite der Äquatorplatte sind zwei Gabeln mit je 27 mm Stärke montiert, in welchen die Spiegelzelle des Teleskops (Deklinationsachse) ruht. Die Spiegelzelle ist mit
20 mm Achsen in diesen Gabeln fixiert. Diese Achsen ruhen in Kugellagern, welche in die Innenseiten der Gabelstützen bündig eingeharzt sind.
Auch hier kommen lange, mittig eingelassene / eingeharzte M10 Gewindebolzen zum Einsatz, mit denen diese Stützen auf der Äquatorplatte befestigt sind.
Zur lateralen Fixierung dienen je zwei Außenstützen (27 mm MPX).
Allgemein
Das Teleskop wird durch Ausgleichsmassen in allen Achsen neutral getrimmt (s. oben), sodass die Antriebe nur minimale Stellkräfte erfahren.
Mittlerweile wurde die Spiegelzelle des Teleskops probeweise in den Rohbau der Montierung eingefügt („Hochzeit“):



Antrieb / Elektronik
Der Antrieb in Rektaszension und Deklination erfolgt durch Schrittmotore (EC-Motion HECM244) mit nachgeschalteten doppelten Planetengetrieben 512:1 (PI PLE); Gesamtuntersetzung 8258:1 bei 1/16 Schrittweite (s. oben).

Aktuell werden diese Motore durch eine Handbox gesteuert (A4-Format). Die Verbindung zur Montierung erfolgt durch ein 5 m langes RS232 Kabel und beidseitigen Sub-D (9-pol) Anschlüssen.
Es ist dem frühen Entwicklungszustand des Antriebes geschuldet, dass sich die Bedienung der Montierung noch relativ komplex gestaltet und nicht über lediglich 4 – 5 Tasten erfolgt: Es muss noch das Verhalten der Schrittmotore bei unterschiedlichen Frequenzen / Lasten (also innerhalb diverser Kennlinienfelder) erprobt und optimiert werden.
Für den nächsten Winter ist eine komfortable Arduino-basierte Variante vorgesehen.
Wie oben angedeutet, stellt die aktuelle Steuerung lediglich eine erste – zugegebenermaßen komplexe - Lösung dar.
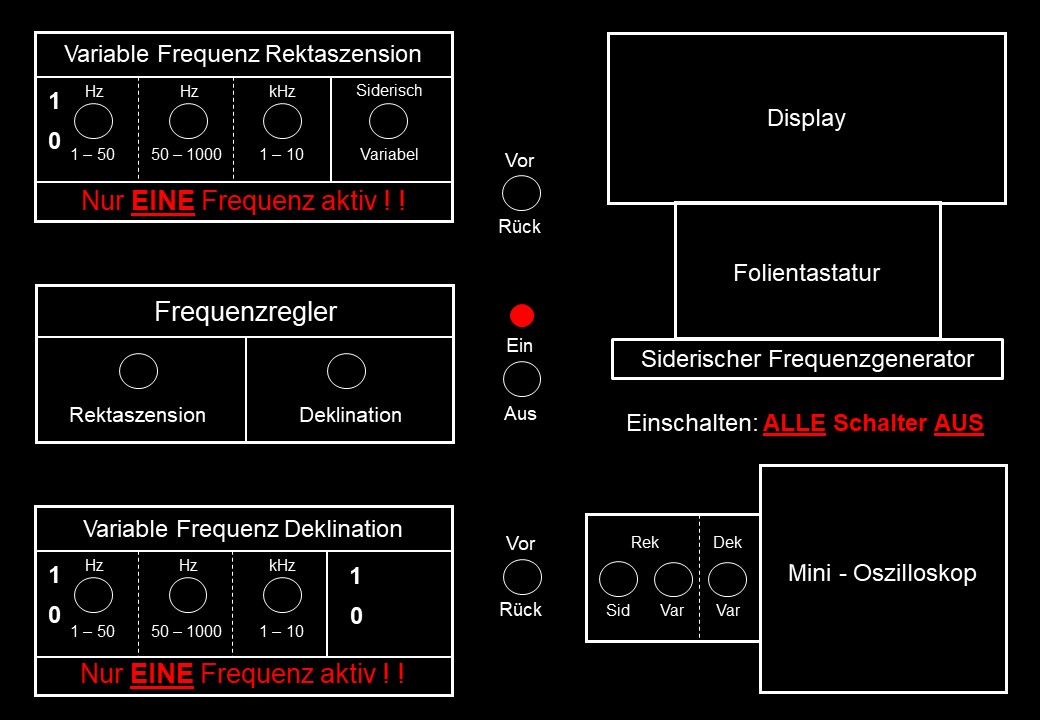
Der Rektaszensions-Motor benötigt für die siderische Nachführung ein Rechtecksignal mit einer Frequenz von 302,184 Hz.
Klingt bei diesen Nachkommastellen zunächst schwierig; ist jedoch einfach zu bewerkstelligen.
Es wird zunächst eine tausendfach höhere Masterfrequenz (302184 Hz) generiert (kleiner programmierbarer Frequenzgenerator mit 1 Hz Auflösung).
Diese wird durch einen dreistufigen dekadischen Frequenzteiler herabgesetzt (altbewährte SN7490). An dessen Ausgang wird die für den Schrittmotor erforderliche Frequenz von 302,184 Hz abgegriffen.
Für schnelles Vor- / Zurückfahren kommt ein weiterer skalierbarer Frequenzgenerator zum Einsatz (s. oben).
Letzteres gilt in entsprechender Form auch für die Deklinationsachse (gleicher Motor, jedoch andere Frequenzen).
Puristen mögen angesichts dieses Konzeptes anmerken, dass die Komponenten dieser Montierung nicht im µ-Bereich gefertigt sind, was jedoch ohne Belang ist, da keine Belichtungen im Bereich von -zig Sekunden oder gar Minuten vorgesehen sind, sondern ausschließlich visuelle Beobachtungen bzw. Stacking zahlreicher kurz belichteter Aufnahmen angesagt sind.
Mehr nach Wiegen aller Komponenten bzw. nach Integration der elektrischen Antriebe.
Derweil viele Grüße in die Runde
Volker
