Hallo,
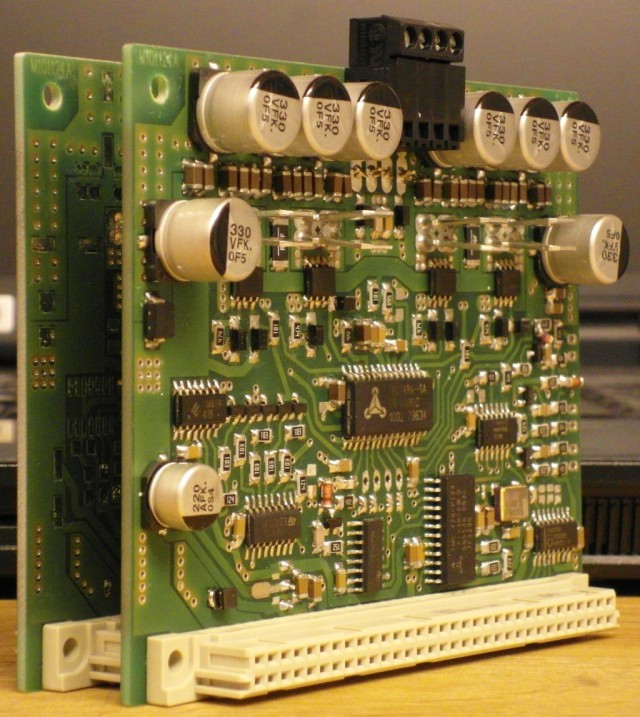
habe den Schaltplan und das Layout der Schrittmotorcontroller-Platine ins Trinamicforum gestellt:
http://www.trinamic.com/ttdg/p…viewtopic.php?f=17&t=2707
Siehe auch diesen Thread zum Entwurf:
http://www.astrotreff.de/topic.asp?TOPIC_ID=102556
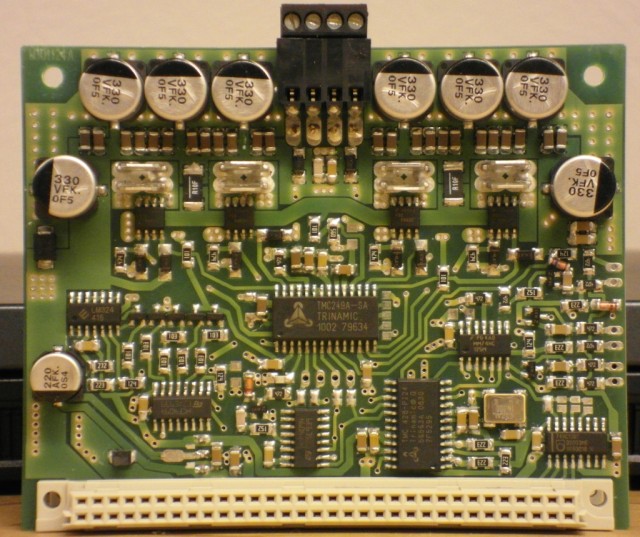
Bauteile wie R,C,D sind in 1206 gehalten, um ein mögliches Handlöten zu vereinfachen.
Man braucht zwei Platinen, je eine für RA und DEC.
Die CS-Adresse wird 74HC138 gewählt - D.h. wir haben zusammen bis zu 8 Chipselects für andere Sachen am SPI.
Die Belegung der freien Anschlüsse am 64pol Stecker wird für I²C,IRQs etc. noch festgelegt.
Der Schaltplan folgt im wesentlichen den Vorgaben von Trinamic aus:
http://www.trinamic.com/tmc/me…MC236_246_239_249_FAQ.pdf
Konstruktive Kritik und eine Prüfung des Schaltplans ist erwünscht ![]()
Grüße
Michael
P.S. Die Eagle Dateien kommen in unser Repo auf Github, aber der Upload klappt irgendwie noch nicht.