Hallo,
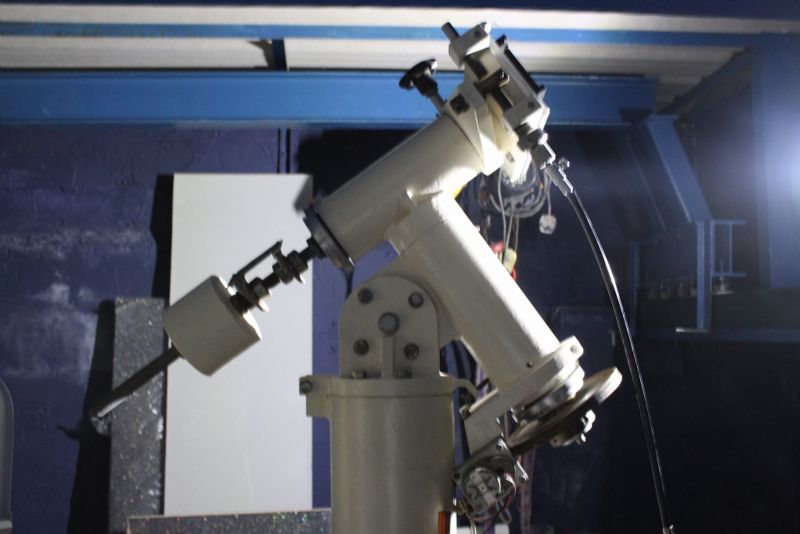
ich muss mich demnächst mal um die Restauration/Modernisierung meiner alten Rupp M.3 kümmern und unter anderem sollen auch die Motoren gewechselt werden. Im Moment sind Oriental Motoren mit 200 Schritten lw=0,85A, Rw=5,0Ohm und einem 1:48 Vorgetriebe anmontiert, bzw. liegen auf dem Haufen des Konvolutes. ![]() Das soll sich aber ändern, denn wenn ich schon herumbastele, dann soll nachher auch halbwegs schnelle GoTo möglich sein. Leider gibt es da ein kleines Problem, denn ich habe von der benötigten Leistung und den Eigenheiten von Schrittmotoren wenig Ahnung.
Das soll sich aber ändern, denn wenn ich schon herumbastele, dann soll nachher auch halbwegs schnelle GoTo möglich sein. Leider gibt es da ein kleines Problem, denn ich habe von der benötigten Leistung und den Eigenheiten von Schrittmotoren wenig Ahnung.
Also frage ich einfach mal das allwissende Forum und hoffe auf zahlreiche kompetente Antworten. ![]()
Noch ein paar zusätzliche Infos die vielleicht hilfreich sind. Die Rupp M.3 hat inzwischen in beiden Achsen Schneckenräder von 220mm Durchmesser und 288 Zähnen und ist vielleicht grob mit der Alt-6 vergleichbar. Also keine ganz kleine Montierung.
MfG
Rainmaker