
Hallo an Alle,
jetzt häufen sich die Selbstbauten, allerdings ist meine "im Werden",
auf Grund meiner Gebrechen dauerts etwas länger. Den schlimmsten Zerspanungsteil habe ich hinter mir..4 Müllsäcke Späne.
Hauptbestandteile sind ein Block aus 7075er Aluminium, zwei große Spindellager Dm. 120/85. Die passende Welle habe ich in Arbeit, so große Teile sind für meine maschinen auch eher ungewohnt, aber es wird und man kann den künftigen Verwendungszweck auch erahnen.
Bei Interesse berichte ich gerne weiter.
Gruß Stefan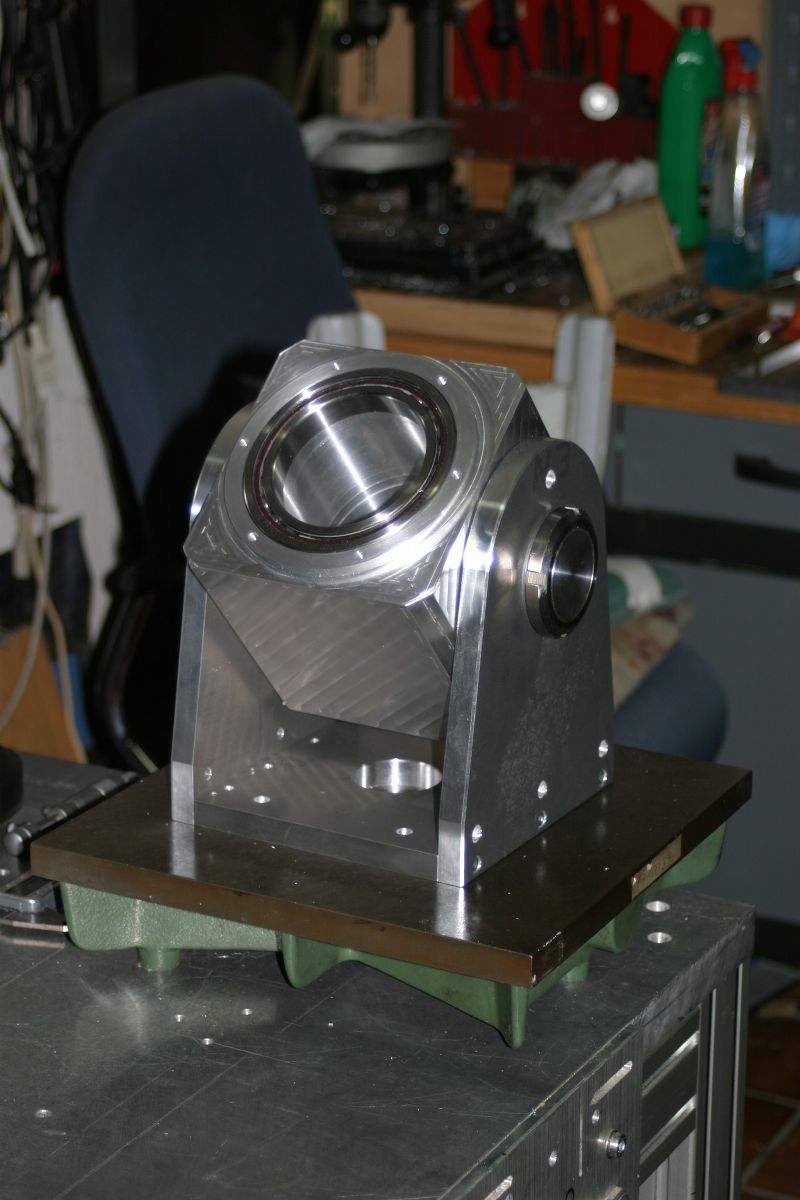
Noch eine Montierung
- Stefan Schaaf
- Geschlossen
-
-
Hallo Stefan,
das interessiert schon einige Leute hier.
Und es sieht schon sehr stabil aus.
Bitte berichte weiter!Gruß Eric
-
Moin Stefan,
fein, noch ein Selbstbauer! Wird ja ein Nobelbau, Spindellager, hui! Und lecker sehen die von Dir gefertigten Teile aus, viel hübscher als meine. Magst Du eine ganz kurze Vorschau geben, wie das weitergehen wird? Ich bin fürcherlich neugierig. Bitte, bitte bau und berichte weiter.
Viele Grüße und gutes Gelingen von
Marcus
-
Hallo Eric und Marcus,
die Polachse kann von vertikal 90°, visueller Betrieb, auf parallaktisch geneigt werden. Die Gegengewichtstange
wird dann abschraubbar.Die Achse ist ja durchbohrt für einen Polsucher. Als Vorbild habe ich mir sozusagen
die Planewave Einarmmontierung ausgesucht...mit etlichen Abstrichen im Antrieb.
Die Montierung soll teilstationär auf einer mobilen Säule aus UHPC aufgestellt werden, deswegen wird die Technik
bez. Ausrichtung und Einnordung etc. minimal sein. Also ziemlich schmucklos aber funktionell, möglicherweise probiere
auch eine Pulverbeschichtung.
Jetzt muss ich erstmal die Hürde mit der dicken Polwelle nehmen und der Basisplatte, dann gehts mit dem Antrieb weiter.
Da werde ich sicherlich Hilfe benötigen.
Ich werde soweit möglich den Ablauf bebildern
Danke für das Interesse
Stefan -
Moin Stefan,
das liest sich mächtig spannend und scheint ja auch eine größere Sache zu werden (ich mußte erstmal schnell sehen, was die Planewaves eigentlich sind), mit interessanten Details - UHPC ist ultra high performance concrete, das Zeug, aus dem manche Leute Maschinenbetten gießen? Ich lese weiter mit!
Nochmal Grüße von
Marcus
-
Hallo Marcus,
UHPC= Ultra hochfester Beton bekommt bei uns nicht den Zuspruch wie z.B. in den USA
Tolles Zeug u. relativ locker anzurühren, selbst von einem Spargel wie mir mit 55kg.
Man kann es praktisch in jede Form bringen, solange man die erforderlich Wandstärke einhält
und es eben wetterfest beschichtet.
Erste Erfahrungen habe ich mit meinem einfachen Drehmaschinenbett bekommen, ziemlich gemurkst
wegen mangelnder Ausdauer, aber trotzdem prima geworden.
Die Fertigung meiner Montierungs-Säule ist schon fest geplant, es hapert noch an der Festlegung
der richtigen Höhe, da ich verschiedene Instrumente nutzen will.Gruß Stefan
-
Moin Stefan,
danke für die Auskunft. Klingt interessant. Und: sehr schön, zum Montierungsbau erstmal eine Drehmaschine bauen, so ist es recht! Kaufen kann ja jeder.
Nochmal Grüße von
Marcus
-
Hallo Marcus,
ganz so versessen war ich jetzt nicht, nur den Unterbau habe ich betoniert mit UHPC.
Inzwischen habe ich neues Material erhalten, der Bau kann also weitergehen. Natürlich wirft
sich so langsam die Kardinalfrage auf: wie groß soll ich das Schneckenrad wählen ? Texereau,
mein Lieblingsbuch, setzt in etwa Spiegeldurchmesser zu Schn.rad Durchmesser in Relation, ist aber
heutzutage nicht mehr üblich. Ich werde wohl 250Z mit Modul 1 nehmen. Größere Durchmesser passen
nicht mehr zum Gesamtkonzept.
Stefan -
hi!
ich hab bei meinem grossen ding ein 218 mm schneckenrad, das ist für 1300mm brennweite gut genug für alles ...
lg
wolfi -
Hallo Wolfi,
Danke für den Tip, der Unterschied von Theorie zur Praxis tut manchmal Not.
Soll ja eine Allroundmontierung werden. In meinem Alter empfiehlt es sich ein
Problem nach dem andern anzugehen, sonst baut man definitiv zu viele Hürden auf
u. verzettelt sich total.
Du bist wohl der "Teleskopcontroller" nehme ich an?Gruß Stefan
-
hi!
meinst wegen dem stuerungsprojekt? ja, das ist mein buzzerl
da ist auch ein youtubevideo mit der grossen montierung ...lg
wolfi -
Sehr fesch... vor allem die Gabel gefällt mir!
Etwas gabelähnliches wird`s werden, wahrscheinlich Einarm.
Dein Buzzerl, ich konnte auf die Schnelle nicht alle Beiträge lesen,
ebenfalls sehr bewundernswert.Da steckt ne Menge Aufwand drin, einfach riesig.Gruß Stefan
-
hallo!
ja, aber es macht spass - ich mache beruflich was ähnliches, und es ist ganz nett, sich einmal wieder ohne den restlichen noise des jobs um eine sache zu kümmern. und so gross ist meine auswahl nicht - ich brauche schon etwas grössere motoren
lg
wolfi -
Hallo,
mein Montierungsbau nimmt langsam Formen an. Ich habe die Montierung auf Füße gestellt um besser hantieren zu können.
Die RA-Achse ist fertig gedreht und die Basisplatte auch. Morgen bekomme ich hoffentlich das neue Schneckenrad mit Schnecke, dann gehts auf der andern Wellenseite weiter. Die Draufsicht momentan zeigt Unterseite Achse mit Zahnriemenrad für den Encoderantrieb und Schraubgewinde für die Gegengewichtsstange. Jetzt wird das Gewicht des Brummers spürbar größer, wohl Zeit Sicherheitsschuhe zu tragen, bei einer Fallhöhe von eine 3/4 Meter wäre der Fuß ziemlich platt...auf der Oberseite...
Ich werde mich bemühen bessere Fotos zu machen.
Gruß Stefan

-
hi!
sehr fesch ... dsa fräsen ist mehr so deins wie das drehen, oder ??
??lg
wolfi -
Hallo Wolfi,
ganz im Gegenteil, ich drehe viel lieber. Aber diese Durchmesser
kann ich leider auf meiner kleinen Drehmaschine nicht mehr spannen.
Die CNC-Umrüsterei beider Maschinen, Fräse und Drehe, hat sich mehr als
bezahlt gemacht bei diesem Projekt. Hat eine Menge Arbeit erspart, die
ich bei meiner Konstitution nicht hätte leisten können. Da jetzt in Bälde der Schneckenantrieb an die Reihe kommt, kann mir jemand zusätzlichen Input zur Konstruktion einer Rutsch-Kupplung geben??
Bauraum für die Druckplatten ist ja alles schon vorgesehen, aber wie
wird die obere Platte angehoben? Ich habe meine alten Zeichnungen leider verschludert und keinen richtigen Plan mehr.
LG Stefan -
hi!
obere platte angehoben? ich gestehe, ich habe mir das nie angetan mit rutschkupplung sondern immer auf vollmotorisierung vertraut. am einfachsten ist es, das schneckenrad zu klemmen. ob der eingriff nach dem klemmen aber auch wieder passt ist ein problem.lg
wolfi -
Hallo Wolfi,
das war mein Gedankengang zu Planungsanfang,einafch ohne...
die Motore machen das.Ich werde die Kupplung auch weglassen und
Basta.
Gestatte eine Frage zu deinem TSC. Wie werden die Stepdriver
angesteuert, wie allgemein üblich Dir / Step, was ja ermöglichen würde
beliebige Endstufen, die Takt / Richtung verstehen, zu verwenden.
Die ganzen Minis von Trinamic Pololu etc..funktionieren ja so.
In meinem 2. Hobbybereich CNC gäbe es da sehr interessante Alternativen
zu diesen kleinen Treibern. Auf Grund der höheren Versorgungsspannungen eher natürlich für stationären Betrieb.
Gruß Stefan -
hallo!
rutschkupplung weglassen hat noch einen vorteil - das ding weiss immer, wo es ist.wie die CNC gemeinde ja öfter feststellt, wirds mit den polulu etc. dingern ab NEMA 23 eher fad, weil die ströme sich nicht mehr über den IC regeln lassen, weshalb eher MOSFETs angesteuert werden, die dann auch höhere leistungen vertragen. der powerlulu (oder so ähnlich) ist ja sowas, den kennst vielleicht. ich verwende derzeit Phidget 1067 endstufen, die fixe 16 mikroschritte mit bis zu 30 V und 4A pro spule maximum vertragen. das sind natürlich ziemliche brummer.
alternativ habe ich damit experimentiert, bis zu 4 motoren mit einem teensy 3.6 anzusteuern. das geht auch ganz ordentlich und wäre eine alternative, bei der auch feinere mikroschritte und mehr oder weniger beliebige treiber möglich sind (wozu ich allerdings eine eigene meinung habe). allerdings ist das dann halt für kleinere montierungen. der teensy wird, so wie die phidget endstufen, in meinem fall über USB vom raspberry pi gesteuert und übernimmt die echtzeitaufgaben (also step/dir etc.)
ich hab hier grade die 4. und hoffentlich letzte revision der PCBs von der steuerung vor mir liegen. dann gibts auch eine schöne dokumentation, wenns dich interessiert.
lg
wolfi -
Hallo Wolfi,
Interesse, da fragst du noch ...aber sowas von! Ich bin ja mehr der
Anwender, von der Entwicklung habe ich äähm eher rudimentäre Kenntnisse.
Ich bin momentan noch unentschieden, was die Teleskop-Steuerung anbetrifft.
Ich erarbeite erstmal die Montierung selber und lasse großzügige Freiräume
für die Motore + evtl. Getriebe.
Also, falls verfügbar -
hallo!
ich hoffe, bis märz eine release zustandezubringen - noch die grosse fette version mit den phidget endstufen, aber ich muss ersteinmal so alles zum laufen kriegen und testen, bevor ich die hardware umbau. wie schwer wird diene montierung und welche motoren hast du angedacht ?lg
wolfi -
Hallo Wolfi,
da muss ich momentan die Antwort noch schuldig bleiben, bin eben
noch bei der RA-Achse. Als Endgewicht der bewegten Teile peile ich
ganz grob ca. 10-15kg an, wobei die zwei Achsen trennbar bleiben sollen.
Ich habe gestern die RA-Getriebeteile bekommen und mache mich
erstmal da dran bevor ich weiter denke. Aber Flanschgröße 56x56,
NEMA 23+ Platz für Getriebe , ist vorgesehen. Das wird bis zum
motorischen Antrieb noch eine Weile dauern. Momentan ist bei uns
außerdem heftiger Schneefall mit Gewittern angesagt, hält von meiner
Bauvorhaben ungemein ab.
Bis die Tage und Gruß
Stefan -
hi!
in der grössenordnung kommst aber mit einem nema 17 motor auch noch bequem durch. onStep und rDuinoScope (hierzulande wenig beachtet, ich habe eines bei mir herumliegen, macht einen guten eindruck) wäre da durchaus auch in betracht zu ziehen ...lg
wolfi -
Hallo Wolfi,
Danke für den Tip. Ich hoffe wir verstehen uns richtig, ich betonte
extra bewegte Teile, ich hoffe ich komme mit 15kg für die Deklinationsachse hin,
da bin ich aber im Zweifel, ich baue leider immer sehr robust u. auf ewige Haltbarkeit.
Der Klotz mit Basis kommt schon auf ++ 25kg. Ich habe ja Hilfe beim Zusammenbauen
Ich muss mich jetzt für einige Tage ausklinken, da wartet jetzt ne Menge Arbeit.
Melde mich mit Fotos zurückLG Stefan
-
Hallo,
ich war recht kräftig an der Arbeit mit der Montierung.
Das Schneckengetriebe ist zum Test und zur Justage mal plaziert
und muss erstmal genau ausgemessen und eigestellt werden.
Die letzten Abende war ich ziemlich platt, das Teil fordert mich
ganz schön...und es wird richtig heavy.
Die neuen Füße/Wangen der Polachse sind jetzt geneigt zur Schwerpunkts-
Verlagerung. Jetzt kann man schon sehen, was es werden soll, also doch
keine Geschützlafette.
Demnächst mehr
LG Stefan
Jetzt mitmachen!
Sie haben noch kein Benutzerkonto auf unserer Seite? Registrieren Sie sich kostenlos und nehmen Sie an unserer Community teil!
