
Hallo Leute,
Da ich immer noch mit dem MCU-Upgrade auf meiner EQ6 herum Eier habe ich mich nun dazu entschlossen Ersatz dafür zu suchen.
Viel kosten darf es nicht also scheiden das Synta-Update für >400€ aus. Da ich Technisch nicht ganz unbedarft bin habe ich mich dafür entschieden etwas zusammen zu bauen. Die Suche führte mich zu OnStep.
Die Montierung muss nicht viel können. Goto und ST4 zum Guiden reicht erst einmal aus.
Arduino Mega2560, vorhanden.
Ramps 1.4, bestellt.
2 x 4988 Treiber, auch vorhanden.
Im Prinzip habe ich erst einmal das nötigste.
Der Plan ist die original Motoren zu behalten. Die sitzen nicht mehr auf dem Synta-Getriebe, sondern habe die Conrad-Getriebe.
Ich weiß, es gibt besseres, momentan ist aber nix besseres drinne.
Wenn ich das richtig verstehe dann ist der RA-Motor Bidirektional und der DEC-Motor Unidirektional der aber sicher auch Bi ansteuerbar ist.
Werde das morgen mal durchmessen.
Ich habe die FW herunter geladen und meinen Mega geflasht, ohne irgend welche Einstellungen in der Config.h vorzunehmen.
Kstars/Ekos/Indi erkennt den Mega2560 als LX200_OnStep und steuert ihn auch an. Soweit scheint das als schon einmal zu funktionieren.
Nun habe ich aber das Problem das ich in 2 Schritten die Konfiguration machen muss.
Schritt 1.
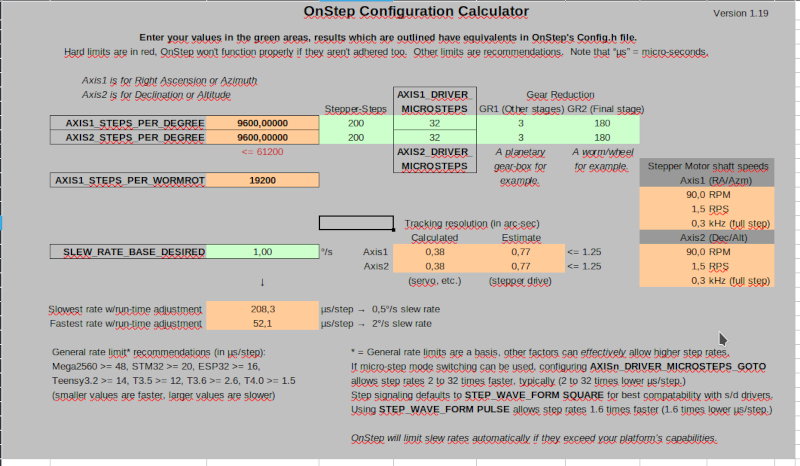
Mit einer Excel Datei das Getriebe "beschreiben".
Schritt 2.
Mit den Daten aus Schritt 1 einen Online Configurator "füttern" der mir dann eine Config erstellt mit dieser ich wieder herum die FW Konfiguriere.
Soweit so gut.
Ich habe nur das Problem das ich nicht sicher weis wie ich die Excel-Datei ausfüllen muss.
Was ich bis jetzt im Internet herausgefunden habe ist folgendes, bin mir aber nicht sicher das die Daten stimmen weil meine Montierung schon ziemlich betagt ist und ich kaum noch Daten darüber finde. Außerdem habe ich nicht mehr die original Getriebe sondern die vom Conrad verbaut.
Alle Daten ohne Gewähr.
Der Orginal-Motor der EQ6 hat 200 Schritte bei 1,8° ?
Das Schneckenrad hat 180 Zähne ?
Das Schnecken-Zahnrad hat 47 Zähne ?
Das Getriebe-Zahnrad hat 36 Zähne ? (Synta oder Conrad) ?
Das Getriebewellen-Zahnrad 12 ? (Kann ich morgen nachsehen)
Ich weis das die Untersetzung vom Conrad-Getriebe 100:1 hat.
Könnte mir jemand bitte helfen die richtigen Daten einzutragen ?
Vielen Dank.
Thomas
