Hi,
nachdem ich jetzt mehrere Jahre Zeit mit meiner EX, der AVX verbracht habe
und mit eben dieser mal mehr mal weniger Nächte lang zu kämpfen hatte, vor allem mit dem Guiding in DEC, beschloss ich neulich mal kurzerhand umzuswitchen.
Preis/Leistung/Gewicht zogen mich dann fast automatisch zur CEM25P[^]
Sie kam flott vom Händler,
aber der erste Eindruck (ausser die tolle Verpackung) war dann doch nicht so dolle[xx(]
- Als erstes mußte ich mal die Flucht zwischen Halterung Gegengewichtsstange und der Lage der DEC-Achse korrigieren.
- Dann in Betrieb genommen und mal munter schwenken lassen, uiii, ab und an fiese Geräusche, nicht gut, aber in der BA gelesen dass man einfach die Feststellschrauben der Schneckenwellen etwas zurückdrehen sollte, dieses nachvollzogen und es war besser
- da man aber technisch interessiert ist, gleich mal das Gehäuse geöffnet und siehe da,
es wurde mächtig an Fett gegeizt, dieses gleich mal mit Fett von CG.5.de behoben,
dann gleich noch eine Unterlegscheibe unter den Knopf der DEC (dass ich erst gar nicht auf die Idee komme diese bis zum Anschlag einzudrehen)--->seither in jeder Lage Ruhe im Karton
Das war das negative,
jetzt die positiven Aspekte (und diese überwiegen bei weitem):
-sie ist wahnsinnig leise
-sie schwenkt wahnsinnig schnell
-BEIDE Achsen kugelgelagert
-Handling Handsteuerung kann ich fast nicht beurteilen weil Steuerung 99,9% mit dem PC erfolgt, ist aber auch überschaubar und gut durchdacht, auch der Tastendruck reagiert sehr gut
-sie führt meinen 480er APO für 90sec ohne Guiding
-und geguidet ist sie die Wucht (für mich!),
bei 5min Frames mußte ich jetzt die letzten Nächte bei 22h Belichtung KEIN EINZIGES Frame verwerfen, bei der AVX hätten das wenn's grade mal saublöd gelaufen ist auch 50% sein können
-das Kabelmanagement finde ich durch die Z-Form angenehmer/einfacher
Von dem her bin ich happy,
dieses Andrücken der Schneckenwelle ans Zahnrad ist genial,
auch den Zahnriementrieb möchte ich nicht mehr missen
Zur Alignment-Genauigkeit kann ich leider noch nichts aussagen weil ich nur noch per skript & APT & Plate-Solving aligne usw. etc.
Was noch ein kleiner Nachteil gegenüber der AVX ist,
die AVX konnte man nicht dazu bringen dass das Teil irgendwie an sich selber fährt, die stoppte dann, das ist bei dem Teil (also bei Steuerung & Alignment über APT) schon möglich, wenn die da das falsche GOTO-Command bekommt fährt die munter weiter bis sie kollidiert, dann rattert halt der Zahnriemen.
Ich will damit sagen dass man sie bei Schwenks halt eher im Auge behalten sollte,
oder halt keine Fehler bei den Kommandos machen wie ich.
Tja, sonst fällt mir i. M. nicht mehr dazu ein,
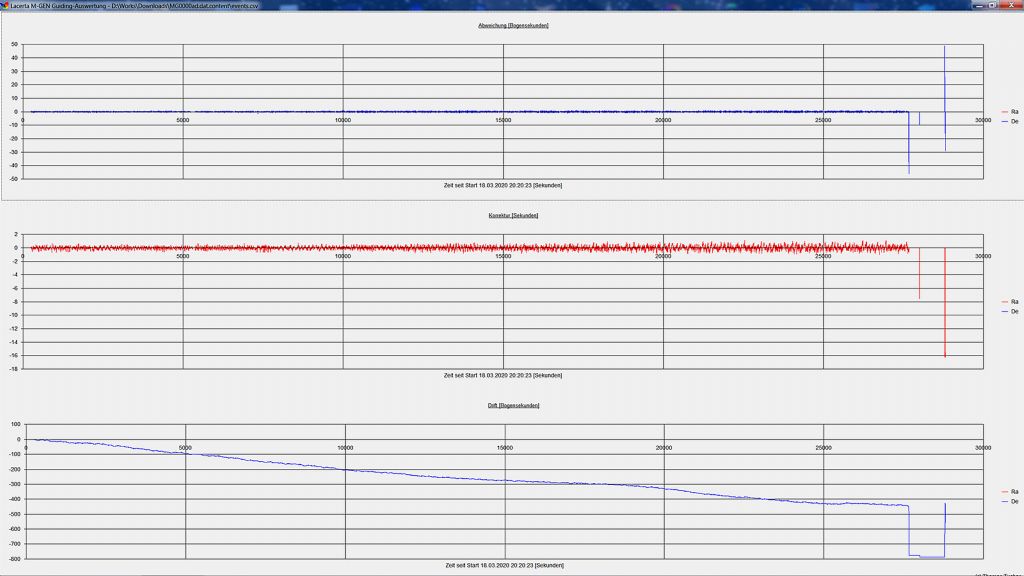
hier noch der Graph der letzten Nacht (das habe ich mit der AVX nie erreicht, nur annähernd)
MfG
Chris