
Moin,
ich bereite gerade meine Meade LX50 (10 Zoll) auf meine Arduino Steuerung vor.
In der LX50 ist ja im Gegensatz zur LX200 nur eine halbautomatische
Goto-Steuerung verbaut.
Also allen Mut beisammen und den Servomotor der RA samt Getriebe und die Meade-Steuerung rausgeworfen. Das Original-Getriebe im Gehäuse war leider nur aus Kunststoff.
Dann eine neue Mechanik gebastelt und an die Schnecke der RA adaptiert. Viel Platz ist da nicht. Das ganze muss ja wieder in das Gehäuse reinpassen (max 85mm hoch darf es sein).
Zum Einsatz kam ein Riementrieb und ein RB35 Getriebe umgebaut auf eine Untersetzung auf 15/1000 und ein Schrittmotor mit einer Auflösung von 200 Vollschritten.
Ich hoffe die kärglichen Infos im Netz stimmen und das Schneckenrad hat wirklich 180 Zähne(?)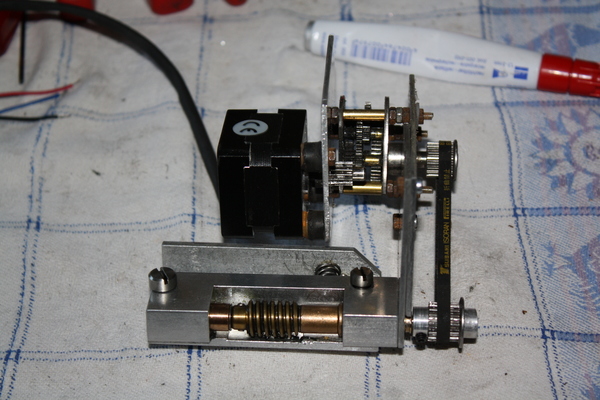
Und zu guter Letzt musste dass ganze dann noch wieder in das Gehäuse 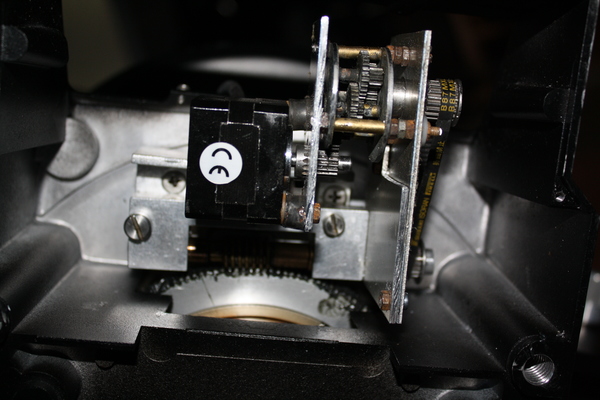
Jetzt muss ich nur die DEC Motorisieren.
cs
Peter
