Hallo zusammen,
gestern hat meine SB-Monti die Fesseln des Bastelkellers gesprengt, und wurde erstmals dem Tageslicht ausgesetzt. Zum Fototermin.
Gestern Abend wurde dann der 8" Newton zum Monti-First-Light draufgepackt. Gibt es dafür eigentlich einen entsprechenden Ausdruck? First-Guide oder so?
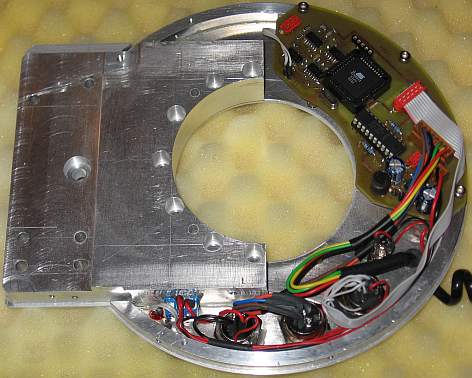
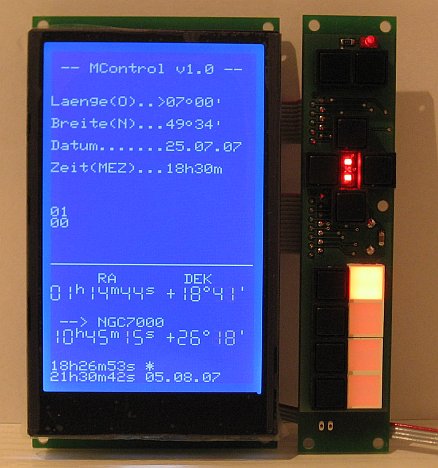
Hier mal das gute Stück, die zugehörige Website ist http://www.astroselbstbau.home…-online.de/montierung.htm

Das First-Dingsda verlief insgesamt sehr erfreulich. Der Aufbau der ganzen Geschichte klappte zügig wie geplant, nachdem die insgesamt ca. 55kg aus dem Auto herbeigeschafft waren.
Nach ein paar Gedenkviertelstunden zur Temperaturanpassung des Newtons war dann Jupiter das erste Ziel. Ziemlich flau im Süden, na ja. Aber darum ging's ja heute nicht. Die Monti hält den gestreiften Gesellen während einer Stunde sauber im Okular, in DEK habe ich ein paarmal korrigiert. Ach so, die Polausrichtung erfolgte über den halbfertigen Polsucher. Ohne Skalenplättchen, ohne Gesichtsfeldblende, ohne in der Polachse justiert worden zu sein, einfach den Polarstern etwa in die Mitte gestellt.
Endlich kein weglaufender Planet mehr, wie bei der zwischenzeitlichen Dobson-Lösung für den 8-Zöller!
Bezüglich der "Stabilität" würde ich sagen: das passt. Natürlich bewegt sich der Planet beim Hantieren am Tubus, nach ca. 1 Sekunde ist er aber wieder an seinem Ursprungsort. Die Dämpfung ist also auch ok.
Leider habe ich den Tubus zu gut austariert, deshalb fiel das Flankenspiel der Schneckengetriebe mit ca. 3-5 Winkelminuten auf. Muss ich wohl nochmal nachjustieren.
Bei niedriger Vergrößerung ist das Bild natürlich super stabil. Man muss dann schon kräftig an den Tubus klopfen, um was zu sehen.
So war dann Cirrus im XL40 mit UHC ein Genuss. Sehr schön funktionieren meine einstellbaren Rutschkupplungen für die beiden Achsen, einfach den Tubus von Cirrus-Ost zu Cirrus-West weiterschieben und dann loslassen...
Auch der drehbare Tubus-Vorderteil des Newtons harmoniert prima mit der Monti. Ein kurzer Dreh und die Einblickhöhe ist 30cm tiefer.
Ein paar Details müssen schon noch getan werden, aber insgesamt sieht die Sache ganz gut aus [8D]
viele Grüße
Martin